Dynamic Positioning (DP Systems)

DP Vessel on Rig Supply.
Teknologi berkembang begitu pesat diseluruh sector dan tidak ketinggalan di sector pelayaran. Ribuan kapal-kapal DP telah dibangun untuk menggeser kapal dengan system konvensional, peluang kerja yang menjanjikan ini pun menjadi target buruan para pelaut. Menjadi DP Operator adalah impian para pelaut offshore, alasanya jelas yaitu peningkatan standard gaji dan gengsi.
Pertanyaanya, apakah cukup seorang pelaut yang memiliki sertifikat DP Unlimited merasa bangga dengan ijazahnya? Kemudian terlena untuk belajar lebih dalam tentang prinsip kerja DP System. Kebanyakan para pelaut setelah mendapatkan sertifikat yang diinginkanya, maka mereka menjadi malas untuk belajar lebih jauh dengan alasan “Praktek tidak seribet teori”
Saya mencoba mencari article tentang DP system yang berbahasa Indonesia dan sampai detik ini belum mendapatakanya, hal ini tentu menyulitkan bagi orang awam dan pelaut yang baru belajar DP Basic untuk mencari referensi. Dari sinilah kemudian saya mencoba untuk membuat article tentang “DP System” dalam Bahasa Indonesia sesuai dengan kemampuan ilmu saya yang serba terbatas, agar orang lain bisa mengambil manfaat dan menambah pengetahuan.
Tulisan tentang DP system berbahasa Indonesia ini adalah yang pertama, karena senior-senior kita yang lebih hebat pengetahuanya belum ada yang membuatnya. Article ini tentu banyak kekurangan atau bahkan kesalahan di dalamnya, untuk itu saya mengundang para DPO di tanah air untuk memberikan input masukan dalam kolom komentar sebagai sarana edukasi untuk meningkatkan skill para DP Operator dari Indonesia.
Article ini sebenarnya sudah lama saya susun semenjak masih DP Basic, namun saya tidak ingin mempublikasinya sampai mendapatkan sertifikat DPO Unlimited.
Tulisan ini juga bisa di copy untuk bahan referensi belajar mandiri.
Yang sangat tidak elok dan menyalahi etika adalah ketika anda mengcopy tulisan ini tanpa menyebut sumber asal dan bahkan mengakuinya sebagai karya tulis sendiri, maka inilah yang disebut “PLAGIAT”.
Semoga kita dijauhkan dari sifat “PLAGIAT” dan semoga article ini bisa bermanfaat bagi kita semua.
Baiklah, mari kita langsung masuk pada pembahasan materi dan semoga bisa menambah wawasan dan manfaat.

Penulis numpang mejeng.
DYNAMIC POSITIONING SYSTEM (DP SYSTEM)
Definisi:
Kapal DP adalah sebuah kapal yang secara otomatis mampu mempertahankan kedudukan atau posisinya (baik itu pada lokasi yang tetap “fixed location”, maupun mengikuti jalur yang ditentukan “predetermined track”) dengan menggunkan tenaga pendorong yang ada (thrusters force). – IMO MSC.645.
DP System adalah sebuah sistem yang secara otomatis dapat mengontrol pergerakan kapal untuk mempertahankan posisi dan haluan dengan menggunakan tenaga pendorong yang ada (active propeller/thrusters).
Seperti kita ketahui bahwa ketika kapal mengapung dilaut, kapal akan senantiasa bergerak hanyut secara dinamis akibat pengaruh angin, arus, ombak dan sebagainya.
DP Systems computer program berisi data-data akurat dari dynamic model kapal yang mensimulasikan bagaimana kapal merespon berbagai macam gaya (various forces) baik itu gaya-gaya dari dalam (Propellers/thrusters/rudders), maupun gaya-gaya dari luar “environmental forces" (angin/arus/ombak). DP System menyeimbangkan gaya-gaya tersebut sehingga kapal bisa ditahan/dikontrol posisinya. Deviasi/penyimpangan dari posisi dan haluan yang diminta akan langsung terdeteksi oleh DP System's sensor dengan pengukuran haluan, posisi, pitch, roll, arah dan kekuatan angin.
Jadi posisi kapal bisa bertahan ditempat dalam batas “excursion limit/batas penyimpangan” sesuai Set point posisi dan haluan yang di input oleh DP Operator, ataupun bergerak pada track yang ditentukan, dan maupun mengikuti target (follow target). Posisi dan haluan kapal juga bisa diubah sesuai keperluan dengan menu-menu yang tersedia pada DP console.
Dengan DP System walaupun tanpa tali ataupun jangkar posisi kapal bisa bertahan ditempat dalam batas tertentu ataupun berpindah sesuai set up DP Operator, dan bahkan mampu mengikuti object yang bergerak secara otomatis (auto track dan follow target) dibawah terpaan arus, ombak dan angin.
Basic knowledge.
SIX DEGREES OF FREEDOM.
Sebelum memahami Basic control DP System, maka kita harus memahami basic pergerakan bebas kapal “SIX DEGREES OF FREEDOM”. Pergerakan kapal inilah yang nantinya akan di kontrol dan dimonitor oleh DP System.
Setiap benda atau kapal yang mengapung bebas diatas permukaan air maka akan dapat bergerak bebas pada 6 arah. Yaitu bergerak maju atau mundur, kesamping kiri atau kanan, berputar haluan 360 derajat, turun atau naik, mengangguk kedepan atau belakang, dan oleng kekiri atau kekanan. Inilah yang disebut “SIX DEGREES OF FREEDOM”
"HANYA 3 ARAH PERGERAKAN (SURGE, SWAY & YAW) YG BISA DIKONTROL & DIMONITOR OLEH DP SYSTEM. SEDANGKAN 3 ARAH PERGERAKAN SELEBIHNYA (ROLL, PITCH & HEAVE) HANYA BISA DIMONITOR UNTUK MENGOREKSI / KEAKURATAN POSITION REFERENCE SYSTEM".

Picture; Six degrees of freedom.
Six Degrees of Freedom yang dikenal dalam DP System antara lain:
- Surge = Pergerakan maju mundur.
- Sway = Pergerakan kesamping kiri atau kanan.
- Yaw = Pergerakan berputar atau perubahan haluan kapal.
Surge dan Sway di monitor dan kontrol oleh Position Reference System, sedangkan Yaw di kontrol/monitor oleh Gyro compass. Hanya 3 pergerakan diatas yang dikontrol dan dimonitor oleh DP System.
Kemudian 3 pergerakan berikutnya adalah:
- Pitch = Pergerakan mengangguk kapal, kapal mengangguk-angguk kedepan dan belakang.
- Roll = Pergerakan oleng kapal, miring kiri dan kanan.
- Heave = Pergerakan naik dan turun kapal.
Pergerakan (Pitch, Roll and Heave) tidak bisa di kontrol oleh DP System, akan tetapi harus diukur dan dimonitor dengan tepat oleh DP System untuk mengoreksi position reference agar lebih akurat.
Pergerakan ini (pitch, roll & heave) disebabkan oleh environmental condition (keadaan cuaca seperti ombak, angin, dan arus).
Untuk memonitor pergerakan Pitch dan Roll, dipasanglah VRU/MRU (Vertical Reference Unit / Motion Reference Unit). Sedangkan heave tidak begitu diperlukan oleh DP System. Namun dewasa ini Heave diukur untuk mengkompensasi HPR, Taut wire, Diving operation, Crane operation dan perlengkapan lain dikapal.
PRINSIP CONTROL DP SYSTEM.
DP System dirancang untuk mempertahankan kedudukan kapal pada posisi dan heading limits yang ditentukan, sekaligus meminimalisir pemakaian BBM serta mengurangi kerusakan (aus) pada permesinan kapal. Kenapa demikian?, karena mesin akan terus running selama kapal ON DP. Bahkan DP system mampu mengoreksi ketika terjadi error pada sistem pengukuran dan bertindak secara akurat apabila terjadi kegagalan pada salah satu thrusters unit.
MATHEMATICAL MODEL.
Mathematical model adalah Karakteristik Hydrodynamic seperti current drag coefficient dan virtual mass data. Yaitu bagaimana kapal merespon semua gaya-gaya yang terjadi akibat pergerakan thrusters, angin dan arus.
Posisi dan haluan kapal diukur dengan menggunakan Gyro compass dan Position Reference System, kemudian input data ini dibandingkan dengan predicted data dari Mathematical model. Perbedaan diantara keduanya kemudian digunakan untuk mengupdate vessel model.
Jadi mathematical model ini berisi data statistic parameter kapal dan sekaligus beradaptasi dengan pergerakan kapal. DP System memerlukan waktu sekitar 30 menit untuk membangun “Mathematical model kapal”.
Penjelasanya adalah dengan analogy sederhana bahwa seorang pelaut walaupun sudah kenyang pengalaman makan garam laut, namun ketika mengemudikan kapal secara manual, dia tetap memerlukan waktu beberapa saat untuk beradaptasi merasakan pergerakan kapal guna mengemudikan kapal dengan steady. Pun sama dengan DP system yang juga butuh waktu untuk beradaptasi dan membangun mathematical model.
The vessel model tersebut kemudian ditampilkan dalam bentuk simulator yang mensimulasikan pergerakan kapal, menghitung kecepatan dan arah pergerakan yang sebenarnya.
Input data model ini berasal dari gaya-gaya dari luar (environmental forces), thrusters forces, drag forces, massa, posisi dan haluan. Sedangkan outputnya berupa perkiraan posisi, haluan dan kecepatan.
THE KALMAN FILTER.


The Kalman Filter menggunakan Mathematical model dari kapal.
Mathematical model tidak 100% akurat, dengan kalman filter inilah model tersebut dikoreksi secara terus menerus agar lebih akurat.
The Kalman Filter memprediksi haluan kapal, posisi dan kecepatan pada setiap 3 arah pergerakan kapal (surge, sway, & yaw), dan sekaligus memasukan algorithms untuk perkiraan efek arus/gelombang.
DP System menggunakan 2 prinsip utama dalam penentuan posisi yaitu: Sofware model posisi kapal dan Position Reference System. Kedua perhitungan posisi ini (model dan measured) dikombinasikan menjadi satu untuk menentukaan perkiraan posisi yang sangat akurat guna mengupdate “The vessel model”. Sedangkan kedua posisi (model dan measured) tersebut tergantung pada performance PRS. The Kalman filter akan menentukan reaksi dari control system untuk merespon penyimpangan dan perhitungan posisi yang tidak menentu.
The Kalman Filter juga memiliki keuntungan:
- Mengoptimalkan haluan dan pengukuran posisi.
- Mengoptimalkan kombinasi data dari position reference system yang berbeda, Kalman filter akan mengkalkulasi variance dan memprosentase keakuratan
- Ketika position reference system tiba-tiba fail/down. Maka model menyediakan "Dead Reckoning" mode. Sehingga kapal mampu bertahan beberapa saat walaupun tanpa adanya update data dari position reference system.
THE CONTROLLER.
The Controller menghitung gaya-gaya yang timbul akibat pergerakan thrusters/propellers agar kapal tetap berada ditempat (station keeping).
Ada 3 modes station keeping pada controller ini, yaitu:
- High precision control: Pada mode ini keakuratan station keeping sangat akurat, kapal betul-betul dijaga agar tetap berada ditempat dan batas haluan yang ditetapkan. Mode ini mengakibatkan pemakaian BBM yang tinggi, pemaksaan mesin sehingga permesinan kapal cepat aus/rusak. Mode ini digunakan pada saat kapal bekerja dalam 500mz of installation.
- Relaxed mode. Relaxed mode lebih halus, station keeping juga tetap akurat, akan tetapi kapal akan bergerak pada batas-batas (excursion limit) tertentu yang ditetapkan oleh system. Biasanya digunakan dalam cuaca yang tenang dan pekerjaan yang mentolelir sedikit pergerakan kapal dan tidak berbahaya.
- Green DP. Menggunakan teknologi control yang berbeda yaitu "Model predictive control", mode ini meminimalisir pemakaian BBM dan bisa untuk segala cuaca. Kapal akan dijaga berada pada batas-batas (exurcion limit) posisi yang ditetapkan.
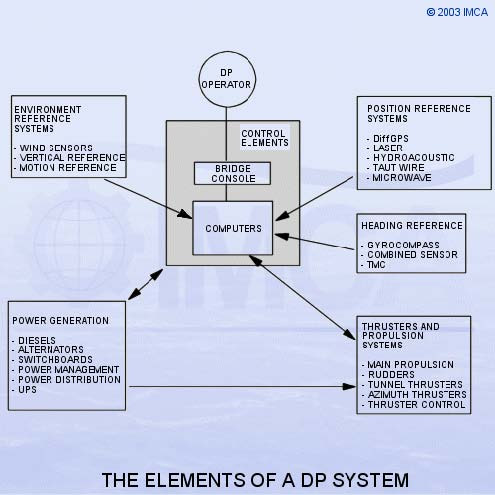
Sebelum memahami lebih jauh maka kita perlu mengetahui apa saja sih elemen-elemen dari DP System:
ELEMENTS OF DP SYSTEM.

DP System bukan semata-mata computer hardware/software yang terinstall dianjungan, melainkan sebuah instalasi komplit secara terintegrasi yang diperlukan oleh kapal DP, mulai dari "Power system, Thrusters system dan DP Control system".
3 Basic system tersebut diuraikan menjadi beberapa DP Element sebagai berikut:
- Power generation & control system (termasuk UPS and Batteries)
- Thrusters & propulsion system.
- Position Reference System.
- Heading reference (Gyroes)
- Environmental reference (Wind sensor, VRU/MRU)
- DP Computer.
- DP Console.
- DP Operator.
Mari kita bahas satu persatu Element of DP System.
1. DP Console/HMI (Human Machine Interface).

Sebuah monitor berwarna dengan resolusi tinggi yang merupakan operation station dari sistem, isinya adalah:
Panel operator dengan push button, group atau kumpulan tombol-tombol yang bisa menyala, joystick, power switch, track ball, heading wheel dan adjustment lainya.
Buttons Group.

- Main Modes (Joystick, Auto Heading, Auto Position, Follow Target, Autopilot, Auto Track - low speed, Auto Track – Move up, Auto Track- High speed) and Surge, Sway & Yaw.
- System Functions
- Thrusters (Propellers, thrusters, steering)
- Sensors (Position Reference System, Wind, VRS, Gyro)
- View selection (Untuk memilih display yang diinginkan)
- Numeric input (untuk input data/angka berfungsi sebagai keyboard)
- Heading Wheel (Setting heading, Rate of Turn, Distance to Turn)
- Joystick (untuk menggerakan kapal surge, sway dan yaw)
- Track ball (Berfungsi seperti mouse).
- Command responsibility (Give, take)
- Alarm (Acknowledged, silence)
2. Position Reference System (PRS).

PRS menyediakan data feedback dari posisi kapal dan sekaligus berguna untuk penentuan posisi "set point" sesuai mode yang digunakan, apakah “Auto Position, Auto Track, Follow target, dll”.
Bagi yang bukan pelaut bisa dijelaskan begini agar mudah memahami "Mobilnya tolong di parkir tepat 3 meter didepan pohon mangga itu yaaa"
Nah gimana caranya kita tahu bahwa mobilnya diparkir 3 meter didepan pohon mangga?, tentunya kita perlu meteran (alat ukur). Meteran atau alat ukur inilah bisa kita sebut sebagai PRS lokal atau penentu patokan posisi parkir agar tepat sebagaimana GPS.
DP System juga harus punya PRS/Patokan posisi agar kapal tidak drift/hanyut dan tetap pada posisi yang diinginkan.
PRS di gunakan untuk mengontrol dan memonitor pergerakan “SURGE and SWAY”. Tanpa mengaktifkan PRS maka pergerakan surge dan sway TIDAK AKAN dapat difungsikan!!!
Keakuratan posisi DP System berkisar antara 1 hingga 2 meter, untuk itu PRS diminta untuk lebih akurat yaitu berkisar 1 meter atau kurang.
Berikut adalah PRS (Position Reference System) yang digunakan pada DP System:
- GPS/DGPS.
- Laser System (Fanbeam, Cyscan, Spot Track)
- Microwave Base/Radio/Radar System/FMCW (Artemis, RADius, RadaScan)
- Underwater Hydro Acoustic system (SBL, LBL, USBL)
- Taut wire.
- DARPS (Untuk shuttle tanker)
Kita bahas satu persatu dengan penjelasan singkat.
1. GPS/DGPS
GPS menunjukan posisi kapal dalam coordinates (latitude/longitude).
Konstelasi satellite GPS setidaknya harus memiliki minimal 24 satellites yang beroperasi dan land-based control station. Kenapa minimal harus ada 24 satellites? Karena ada 6 orbit satellites GPS, dimana setiap orbitnya terdapat 4 satellites yang beredar (6x4 = 24 satellites).
Dengan konfigurasi seperti ini maka setidaknya akan tersedia 5 - 8 satellites yang nampak dari setiap titik di bumi.
Tentunya saat ini sudah banyak satellites yang beredar di angkasa.
Untuk mendapatkan posisi yang akurat, GPS Receivers setidaknya menggunakan 4 atau lebih GPS Satellites.
3 Satellites akan membentuk segitiga posisi dan satellite yang ke-4 sebagai koreksi waktu.
GPS Receivers juga compatible untuk menangkap signal GLONASS (buatan Russia) sehingga menambah keakuratanya.
Keakuratan GPS adalah sekitar 15 meter
Keakuratan GPS ini masih ditingkatkan lagi dg DGPS (Differential GPS), adapun keakuratan DGPS mencapai sekitar 10 cm.
DGPS dioperasikan menggunakan fixed GPS Reference stations yang dibangun ditempat-tempat tertentu di seluruh dunia. DGPS inilah yang dipergunakan sebagai PRS dalam DP System.
Apabila dikapal memiliki 2 DGPS, maka tidak bisa dikatakan memiliki 2 PRS dengan principle yang berbeda karena beresiko terjadinya “Common mode failure”, akan tetapi 2 PRS dengan principle yang sama.
Ada beberapa error yg sering terjadi pada DGPS, diantaranya adalah:
- Jumlah satellite yang nampak atau ditangkap. Jika kurang dari 4, maka akan trigger alarm dan direject oleh system.
- Horizontal Dilution of Precision (HDOP). Semakin besar nilai DOP maka artinya semakin lemah ketepatanya. HDOP terjadi karena posisi satellite yang saling berdekatan, sehingga segitiga area posisi pun membesar dan mengakibatkan keakuratanya melemah. Makanya disebut “Dilution of Precision”. Umumnya nilai DOP yang bagus berada dibawah angka 1 dan maximal nilai DOP angka 4. Maka akan terjadi alarm ketika HDOP berada diatas angka 4.
- Multipath Error. Pada saat kapal dekat dengan platform atau instalasi, maka signal satellite akan dipantulkan oleh struktur bangunan platform sehingga terjadilah “Multipah Error”.
- Satellite dapat tertutup oleh struktur platform/helipad.
2. LASER SYSTEM (FANBEAM, CyScan dan SPOT TRACKS)
Laser menunjukan posisi dalam baringan&jarak (bearing&distance) relative.
System laser terdiri atas laser unit/sensor yang di install di kapal dan reflector yang bisa dipasang pada Rig/platform.
Spot track responder memiliki “unique ID” khusus yang bisa di enable pada monitor sensor guna menghindari kesalahan pengambilan target ketika di platform banyak reflector (multiple target) yang terdeteksi oleh spot track sensor.
Walaupun sistem laser di claim mampu menangkap signal reflector sejauh 2km, namun pada prakteknya digunakan pada jarak 200-250 meters saja.
Keakuratan posisi jarak yang diperoleh dari sistem laser adalah 20 cm dan keakuratan baringan/bearings sampai dengan 0.02 derajat.
Adapun Error yang biasa terjadi pada Laser system adalah:
- Shadow zone. Ada area dimana laser system tidak akan bisa menangkap signal reflector, untuk itu jangan menaruh reflector pada shadow zone area agar reflector bisa terdeteksi oleh sistem.
- Keadaan cuaca. Cuaca yang buruk (Hujan, kabut, badai pasir) dapat menurunkan keakuratan Laser system.
- Ganguan benda-benda yang mengandung reflector akan menyebabkan terjadinya false signal, false signal ini diantisipasi dengan “unique ID” yang terdapat pada responder.
- Signal reflector dapat ter-block oleh muatan ketika menurunkan cargo dari platform/Rig Barge menggunakan crane.
3. MICROWAVE BASE / RADIO / RADAR SYSTEM / FMCW (Frequency Modulation Continuously Wave), Antara lain: Artemis, RADius, RadaScan
Posisi yang diperoleh dari system ini berupa Baringan&jarak (range&bearing).
Basic prinsip kerjanya seperti Radar, tapi hanya akan menangkap signal transponder yang kita set.
Contohnya adalah;
RADius.
RADius memiliki maximum range distance sampai dengan 1000 meter, akan tetapi jarak ideal yang dapat ditangkap oleh DP system adalah 200 meter saja. RADius memiliki keakuratan posisi sampai dengan 0.5 meter dan 0.5 derajat.
Di dalam transponder RADius dipasang sebuah baterai kecil untuk mengaktifkan “unique ID”, nah fungsi unique ID ini adalah untuk memudahkan identifikasi target atau menghindari kesalahan pengambilan target. Kesalahan pengambilan target bisa terjadi jika ada beberapa transponder milik kapal lain yang terpasang di platform.
ARTEMIS.
Posisi yang diperoleh dari system ini berupa Baringan&jarak (range&bearing) relative.
Prinsip kerjanya menggunakan sistem Microwave signal antara object yang bergerak dan fixed station. Artemis pada object tetap (Fixed station) dan Artemis pada object yang bergerak (Mobile station) dikapal sama-sama memancarkan signal yang akan saling di lock oleh antenna satu sama lain. Frequency yang digunakan di setting menggunakan address card.
5. HYDROACOUSTIC POSITION REFERENCE SYSTEM (HPR/HiPAP).

HPR/HiPAP adalah termasuk “Underwater Position Reference System”.
Penentuan posisi dibawah air (underwater positioning) dengan tranducer dibawah lunas kapal bekerja mentransmit & menerima acoustic signal (signal suara) sedangkan underwater beacon (transponder/pinger/responder) dibawah air menerima & mentransmit ulang acoustic signal tersebut.
Posisi diperoleh dari alat/devices dibawah air dengan perambatan suara melalui air.
Ada 4 macam HPR/HiPAP:
- Long Base Line (LBL) = Single transducer di lunas kapal dan minimal 3 kumpulan transponder didasar laut. LBL lebih akurat drpd SBL/USBL, tidak memerlukan VRU, akan tetapi mahal dan hanya jarak yang menjadi hasil pengukuranya.
- Short Base Line (SBL) = Kalo ini kebalikanya LBL yaitu kumpulan beberapa (3) Transducer yang ditempatkan dibawah lunas kapal (penempatanya hrs dijauhkn dari thrusters) dan Single Transponder/pinger didasar laut, memerlukan VRU untuk koreksi pergerakan kapal. Hasil pengukuranya adalah jarak dan azimuth.
- Ultra Short Base Line (USBL) atau dikenal juga dengan SSBL (Super Short Base Line) = Single tranducer dan single transponder. Receiving unit ditempatkan pada tranducer dibawah kapal, sedangkan transponder didasar laut ataupun pada ROV. Bisa digunakan pada object tetap/diam maupun object bergerak sebagai tracking system. Posisi diperoleh dari hasil pengukuran jarak dan sudut/bearing. Memerlukan VRU untuk koreksi pergerakan kapal.
- Long and Ultra Short Base Line (LUSBL) = adalah kombinasi dari LBL dan USBL dengan akurasi yang tinggi untuk deep water dan survey operations. Signal transponder dikalibrasi menggunakan USBL. Sistem ini sangat berguna pada kondisi signal acoustic yang buruk.
Ada juga MULBL (Multi User Long Base Line) yaitu single tranducer dan minimal 3 kumpulan transponder didasar laut dimana bisa digunakan oleh multi user (banyak kapal) sekaligus ROV.
6. TAUT WIRE.
Mekanikal system dari Taut wire terdiri atas bandul pemberat (sinker weight) yang diturunkan sampai ke dasar laut menggunakan wire dan winch (mesin derek) dikapal dimana wire dijaga agar selalu tegang (Auto tension) tanpa mengangkat bandul pemberat. Inclinometer sensor head dipasang pada boom untuk mengukur sudut vertikal taut wire terhadap dua bidang tegak lurus.
Keakuratan taut wire sekitar 2% dari kedalaman air, sampai dengan kedalaman 500m. Sangat bagus untuk mempertahankan posisi untuk operasi yang memakan waktu lama dan dapat bekerja secara independent.
Adapun kerugianya adalah
- Ketika cuaca buruk/heavy swell yang dapat mempengaruhi performance dari Taut wire.
- Permukaan seabed/dasar laut harus dipastikan bebas dari instalasi dasar laut seperti pipa-pipa/wellhead/kabel laut. Untuk itu sebelum mendeploy taut wire harus di koordinasikan dengan surveyor atau diving supervisor.
- Keakuratanya hanya mencapai kedalaman 500 meter.
7. DARPS (DiffStar Absolute and Relative Positioning System).
Jika DGPS menyediakan posisi untuk posisi yang tetap (fixed position), bagaimana dengan kapal yang memerlukan penentuan posisi antara 2 kapal yang bergerak seperti shuttle tanker dan FPSO.??.
DARPS inilah jawabanya.
FPSO menggunakan standar DGPS untuk memonitor posisinya, sedangkan shuttle tanker menerima GPS data dari GPS Receivernya sendiri dan juga menerima GPS data dari FPSO melalui UHF link.
Ada beberapa test oleh DP System guna mem-validasi seluruh keakuratan PRS yang telah disebutkan diatas yaitu antara lain: Prediction test, variance test, freeze test, divergence test, dan median test.
3. POWER GENERATION & CONTROL SYSTEMS (Termasuk UPS dan Batteries).
Guna menghindari terjadinya shortage of power dan blackout, maka perlu dilakukan langkah-langkah pencegahan yakni Power management system, Power protection system dan termasuk Redundancy system.
1. Power protection system.
Protection system bekerja dengan cara mendeteksi kondisi abnormal dalam jaringan listrik dan mengisolasi setiap bagian dari gangguan jaringan fungsi listrik secara menyeluruh.
Kondisi-kondisi abnormal yang perlu dicegah antara lain: Earth fault, overload, Short circuit, under and over Frequency/voltage, governor.
Proteksi ini akan mendeteksi, melokalisir, menunjukan dan me_remove fault/error.
Protection ini berupa: Fuses, Protection relay, Timers dan Circuits breaker.
2. BUS TIE, OPEN AND CLOSE.
Untuk memahami ini kita harus mengerti definisi-definisi berikut:
Alternator adalah peralatan elektromekanis mengkonversikan energi mekanik menjadi energi arus listrik bolak-balik.
Busbar adalah Penghantar arus listrik yang berbentuk pelat tembaga/alumunium persegi didalam panel listrik untuk mendistribusikan energi listrik sesuai kebutuhan.
Busbar ini berfungsi seperti kabel, tapi kalau dalam panel menggunakan kabel tentu tidak praktis, maka dibuatlah Busbar yang lebih sederhana dan tidak mudah panas karena arus listrik yang besar.
Diesel generators untuk jaringan listrik dikapal biasanya memiliki 2 buah Busbar yang terhubung dengan Bus tie, setiap Busbar akan disupply oleh alternator yang berbeda. Penataan ini untuk pembagian energi listrik dikapal. Jadi Busbar biasanya dioperasikan dengan Bus-tie open atau closed.
Bus-tie breaker adalah sebuah device atau piranti yang berfungsi untuk menghubungkan atau memutuskan (connect/disconnect) switchboard. Bahasa enaknya saklar atau breaker.
Bus-tie closed artinya terhubung, sedangkan Bus-tie open artinya terputus.
Jika jaringan listrik dioperasikan dengan Bus-tie closed (terhubung). Tentu sistem ini lebih mudah, ekonomis dan flexible. Karena setiap alternator dapat mensupply tenaga listrik keseluruh jaringan dan bukan pada satu sisi saja, namun resikonya jika ada satu single point power failure bisa menyebabkan blackout total (total loss of power) atau merambat ke system yang lain.
Apabila jaringan listrik dioperasikan dg Bus-tie open (ter_disconnect), maka 2 switchboard akan beroperasi secara independent, sehingga jika terjadi single point failure tidak akan menyebabkan blackout total (no total loss of power).
Ketika terjadi failure, maka switchboard bisa overload trip.
Disinilah gunanya Power system management untuk mencegah keadaan-keadaan tersebut terjadi dikapal DP.
Adapun untuk penataan Bus Tie “OPEN (DISCONNECT) dan CLOSE (CONNECT) untuk DP System adalah sebagai berikut:
DP Class 1: Hanya dioperasikan dengan switchboard tunggal (non redundancy), sehingga tidak ada requirement untuk Bus tie close atau open.
DP Class 2: Power system harus dibagi menjadi 2 system atau lebih yang mana ketika terjadi kegagalan (loss of power) pada salah satu system, maka harus ada minimal satu system yang tetap beroperasi, tidak boleh terjadi total black out. Maka power system dioperasikan dengan minimal 2 switchboard yang mana Bus ties boleh berada pada posisi Closed ataupun open, namun jika bus tie closed, maka harus terdapat system yang secara otomatis dapat membuka posisi bus tie (open) ketika terjadi failure, sehingga failure tersebut tidak menular ke system yang lain guna menghindari total loss of power.
DP Class 3: Hanya dioperasikan dengan Bus tie terbuka/open/terdisconnect, dengan power system yang terbagi menjadi 2 system atau lebih. Jadi setiap switchboard bekerja secara independent dan tidak terhubung satu sama lain.
Pembagian power system juga harus ditempatkan dalam A.60 Class division (kedap air dan kebakaran)
Mudah pemahamanya begini, untuk kapal DP1 bisa dioperasikan dengan single switchboard. Jadi seluruh system akan saling terhubung dan bisa load sharing. Akan tetapi ketika terjadi failure pada salah satu generator, maka bisa menyebabkan total black out. Dalam DP1 keadaan ini tidak menjadi masalah karena DP1 tidak memiliki redundancy system.
Sedangkan untuk DP2 dan DP3, biasanyan dibagi menjadi 2 switchboard atau lebih, masing-masing switchboard akan mensupply listrik ke thrusters/propellers. Misalnya Switchboard 1 mensupply listrik untuk Bow thrusters no.1 dan propeller kanan, sedangkan switchboard 2 mensupply listrik untuk Bow thrusters no.2 dan kiri. Apabila Bus tie dalam posisi terbuka (disconnect), ketika terjadi failure pada switchboard no.1, maka kita masih punya switchboard no.2 sehingga masih ada 1 thruster dan propeller untuk mempertahankan posisi & haluan kapal. Inilah fungsinya redundancy sytem yaitu ketika terjadi single failure, maka kapal tidak akan loss of position.
Saya kurang mempunyai kecakapan untuk berbicara lebih jauh tentang power management system, jadi bisa dipelajari lebih lanjut dalam manual book DP Operation dikapal atau bertanya kepada ahlinya yaitu engineer di kapal.
Yang terpenting bagi seorang DP Operator adalah memperhatikan berapa power available&demand, dan memahami konfigurasi DP Set up untuk Bus tie Open atau Close.
Power demand untuk DP Operation tidak boleh melebihi 80% dari power yang tersedia agar tidak terjadi blackouts atau kegagalan system. DP System akan memberikan alarm messages apabila penggunaan power sudah mencapai atau melebihi limit power yang tersedia.
Jika demand power terlalu tinggi (Propellers/thrusters bekerja melebihi limit), ada 2 kemungkinan yang perlu dilakukan:
- Jika memungkinkan, maka haluan kapal yang harus diubah agar menghadap/mengikuti arah arus/angin.
- Memindahkan lokasi kerja pada Lee side
- Tapi jika cuaca dan nature of operation yang tidak mengizinkan, maka harus stop operation dan keluar dari lokasi sampai cuaca mengizinkan.
DP System menyediakan fungsi informasi sebagai berikut untuk mencegah terjadinya Blackout.
- Generator Load Limitation.
- Diesel Engines Load Limitation
- Diesel Engine Load Monitoring
- Thrusters Load Monitoring (Current/Power).
UPS (Uninterruptable Power Supply) dan Batteries.
DP Control System (DP Computer, Console, Position&Environmental reference system) harus di supply dengan power yang stabil dan apabila terjadi blackout, maka system harus tetap running dengan durasi minimal 30 menit.
Untuk keperluan tersebut maka dipasanglah UPS (Uninterruptable Power Supply), didalam UPS terdapat battery yang bisa menyimpan power cadangan untuk supply listrik selama 30 menit ketika terjadi blackout.
Untuk kapal DP2 dan DP3, power supply harus benar-benar full redundant dan tidak boleh terjadi satupun terjdinya kegagalan sistem dan battery bisa mem_backup supply power dengan durasi selama 30 menit. Sehingga harus ada minimal 2 UPS yang mensupply power ke masing-masing DP control system.
4. THRUSTERS.
Thrusters adalah alat pendorong/penggerak/propulsion system untuk keperluan olah gerak kapal, ada 3 jenis thrusters yang biasanya digunakan pada kapal2 DP; Main Propellers, Thunnel thrusters, dan Azimuth thrusters. Bisa juga ditambahkan disini yaitu sistem kemudi yang tentu saja sudah paketan dengan Main Propellers. Jadi ketika berbicara thrusters pada kapal DP itu artinya seluruh system penggerak yang ada baik itu main propellers, bow thrusters, dan stern thrusters. Semua ini disebut Thrusters.
Thrusters system harus mempunyai tenaga yang cukup untuk mendorong kapal pada 3 arah yaitu arah longitudinal, transfersal, dan yaw atau heading/haluan.
Minimum requirements untuk kapal DP adalah sebagai berikut:
- 2 Thunnel thrusters dan Propeller.
- 1 Buah Thunnel thruster dan Azimuth thruster.
- 2 Azimuth thrusters.
Umumnya kapal selalu dirancang dengan sistem lebih dari minimum requirements diatas yaitu untuk menaikan capability olah gerak dan sekaligus sebagai Redundancy system (sistem cadangan).
Kita tidak akan membahas terlalu panjang penataan sistem thrusters krn ini adalah instalasi tetap yang bisa dipelajari ketika sudah onboard.
Bagi seorang DPO yang wajib diketahui ketika diatas kapal mengenai thrusters adalah start/stop prosedur, emergency stop, transfer dari forward ke aft control dan sebaliknya, bagaimana meng-enable thrusters kedalam DP system dan independent joystick, power thrusters limitation, type of thrusters, dan tentunya familiar dengan thrusters manual control.
5. DP SENSORS (Heading and Environmental Reference)
Ada 3 jenis DP sensors yaitu:
- Wind sensors, Anemometer adalah alat yang digunakan untuk mengukur arah dan kecepatan angin. Angin merupakan salah satu elemen gangguan yang utama bagi kapal, Arah dan kecepatan angin ini digunakan untuk improve position control yang langsung direspon dengan thrusters demands.
- VRS (Vertical Reference System/Unit) atau MRU (Motion Reference Unit). Fungsi dari MRU/VRS adalah untuk mengukur atau memonitor Pitch, Roll, dan Heave. Walaupun DP System tidak mengontrol pergerakan kapal Pitch, Roll dan Heave. Tapi pergerakan tersebut harus diukur untuk meningkatkan keakuratan position reference system. DP System hanya bisa mengukur atau memonitor pergerakan “pitch, roll, dan heave”, dan sama sekali tidak bisa mengontrolnya. Jadi walaupun ada ombak, kapal DP ya tetap goyang-goyang juga karena DP System tidak bisa mengontrol pergerakan goyangan ini.😁
- Heading/Haluan (Heading Reference), dikontrol dan dimonitor oleh Gyro compass. Gyro compass mempunyai fungsi ganda, yaitu mengontrol/memonitor haluan dan sekaligus perubahan koordinat. Dalam manuver kapal penentuan haluan adalah hal yang paling utama. Salah dalam menentukan haluan, maka kapal akan sulit dikontrol baik oleh DP system maupun manual. Untuk itulah kenapa dalam DP Operation, maka yang harus di lock/kunci pertama kali adalah “YAW atau HEADING” pada saat DPO sudah menemukan haluan yang tepat diinginkan.
6. DP Operator (DPO).
Ketika berbicara “System” maka harus mencakup keseluruhan elemen yang mendukung operasional DP.
Jadi Human element (DPO) juga termasuk dalam Element of DP System.
Tanpa adanya DP "Key" personnel yang kompeten maka DP Vessel rawan mengalami kegagalan system dan bahkan menjadi ancaman safe operasi kapal.
Ada 2 jenis DPO Certificate dan keduanya berlaku secara internasional.
- NI DPO certificate yang dikeluarkan oleh Nautical Institute UK London
- DNV-GL DPO certificate yang dikeluarkan berdasarkan DNV standard sesuai requirement dari NMA (The Norwegian Maritime Authority). Sebelum adanya DPO DNV-GL, NMD (Norwegian Maritime Directorate) juga pernah mengeluarkan sertifikat DPO yang di kenal dengan NMD DP Certificate. Pada tahun 2004 Nautical Institute (NI) membuat agreement dengan NMD untuk menerima atau menyetandarkan NMD DP Certificate setara dengan NI DP Certificate. Untuk informasi lebih jauh tentang ini bisa dilihat pada website NI Alexis platform dengan bahasan “NMD To NI DP Certificate equivalency”
2 Bahasan sertifikat tersebut tentu akan menarik untuk diketahui bagi para DPO atau calon DPO.
Kita tidak membahas Engine “Key" personnel, karena untuk engineers cukup mengikuti DP Maintenance course maka mereka sudah bisa bertugas di kapal DP. Jadi tidak ada kendala dan panduan apa-apa bagi para Engineers.
NI DP Operator Certificate
The Nautical Institute memberlakukan aturan yang ketat untuk mendapatkan DP Operator Certificate.
Nautical Institute DPO Training Scheme:
Untuk menjadi seorang DPO dengan NI License maka harus melewati fase-fase metamorfosis sebagai berikut:
1. Phase A: DP Induction course + Online examination.
Calon DPO harus mengikuti training "DP Induction" pada training centre yang mendapat approval dari Nautical Institute dan lulus multiple choice online examination. (4 Hari training + 1 Hari online assessment = 5 Hari).
DP Induction berisi materi: Prinsipal DP System, Main components DP system, dan training pengoperasian DP System pada computer console.
Dari training centre calon DPO akan mendapatkan “DP Induction course certificate dan NI DP Logbook”
2. Phase B: Minimum 60 Days DP sea time, completion of task section and Company confirmation letter.
Setelah melalui Phase A diatas, maka calon DPO harus mengikuti minimum 60 hari training berlayar di kapal DP (DP Sea time) dan menyeselesaikan tugas-tugas (task section) yang terdapat dalam DP Logbook. Task section ini penting untuk dijalani dengan sungguh-sungguh agar menjadi DPO yang kompeten. 60 hari training masa layar ini harus dibuktikan dengan "Company Confirmation Letter" dari perusahaan/owner kapal bagian manager operasi (bukan crewing). Trainee DPO tidak akan bisa melanjutkan ke step berikutnya jika requirements ini tidak terpenuhi.
DP Sea time bisa diklaim sebagai 1 hari, apabila seorang DP Trainee/DPO terlibat dalam DP Operation minimum 2 jam dalam sehari (Minimum 2 jam = terhitung 1 hari).
Ada 2 jenis DP Sea time yaitu Active dan Passive. DP Active Seatime artinya kapal SET UP ON DP atau menggunakan DP System untuk mengontrol pergerakan kapal pada saat operasi manuver, sedangkan DP Passive sea time artinya Trainee DPO belajar mengoperasikan DP System dengan computer simulator yang memang sudah built-in pada DP Computer dikapal.
Pada phase B, Trainee DPO boleh meng-claim “Passive DP Seatime” sebanyak 25% dari minimum requirement 60 hari diatas, jadi maximum Passive DP = 25% x 60 Hari = 15 Hari. Dengan demikian ketika kapal tidak terlibat operasi DP, misalnya berlabuh, standby, atau sandar. Maka Trainee DPO bisa menggunakan built in simulator pada DP Computer untuk belajar dan memasukanya pada DP Logbook.
Phase ini adalah masa yang paling sulit bagi calon DPO, karena sulitnya mendapatkan kapal untuk training DP sebab perusahaan sangat jarang ada yang mau menerima pelaut bekerja dikapal DP hanya bermodal sertifikat DP Induction. Alasan perusahaan sangat jelas, yaitu calon DPO tidak akan mampu mengoperasikan DP System di kapal dan tentu keberadaan mereka akan dianggap merugikan.
3. Phase C: DP Simulator course + Online Examination.
Apabila phase B telah selesai dilalui, maka calon DPO harus kembali mengikuti training "DP Simulator Course" dan menyelesaikan online test. (4 Hari training + 1 Hari Practical exam and online theoretical assessment = Total 5 Hari).
DP Simulator focus pada pengoperasian DP System dalam berbagai kondisi, Different DP Control mode, dan DP Contingency plan.
Dari training centre calon DPO akan mendapatkan “DP Simulator certificate + Tanda tangan dengan stampel pada DP Logbook”
4. Phase D dan Phase E: Minimum 60 days DP Sea time, Statement of suitability from the SDPO/Master and Company confirmation letter.
Selepas trainee DPO mendapatkan "DP Simulator Certificate". Calon DPO harus berlayar lagi dikapal DP selama minimum 60 hari (DP Sea Time) dan mendapatkan "Statement of Suitability" yang ditanda tangani oleh SDPO atau Nahkoda dikapal terakhir tempat training.
Masa layar ini harus dibuktikan dengan "Company Confirmation Letter" dari perusahaan/owner kapal bagian manager operasi.
Masa layar 60 hari ini bisa dikurangi menjadi 30 hari saja dengan cara mengikuti STR Course (Sea Time Reduction).
Pada phase ini hanya ÄCTIVE DP SEATIME yang diakui atau bisa diclaim.
5. Jika seluruh tahapan diatas selesai, calon DPO bisa mengajukan online application dan mengirim semua dokumen ke Nautical Institute di London.
Dengan catatan seluruh elemen diatas: DP Basic Certificate, DP Advance certificate, DP Sea time phase B dan Phase E dan Statement of suitability “HARUS SELESAI DALAM WAKTU 4 TAHUN”, jika ada yang lebih dari 4 tahun, maka harus ambil/retake ulang.
Selanjutnya Nautical Institute akan mem_verifikasi dokumen-dokumen tersebut dan jika valid, calon DPO bisa mendapatkan "DPO Certificate".
Dan bisa menjadi DP Operator dikapal-kapal DP.
Perhatikan schema dibawah untuk lebih jelas.

DPO DNV-GL Certificate.
DNV telah mengembangkan skema tersendiri untuk training dan certification DP Operator, skema ini menjadi alternative yang menarik, lebih mudah dan flexible bagi para calon DPO yang stuck atau kesulitan mendapatkan sertifikat DPO sesaui standard Nautical institute karena alasan tertentu. DP DNV-GL Certificate juga sama-sama internationally standard/approved dan diterima oleh semua Negara diberbagai belahan dunia karena DNV sendiri juga bukan sembarangan, bahkan banyak circular atau requirement tentang DP System yang bersumber dari DNV.
DP Operator dengan DP DNV-GL sertifikat juga mempunyai keuntungan ganda karena berkesempatan untuk mendapatkan NI DP Certifcate dengan cara mengikuti NI Scheme tapi statusnya sudah bukan lagi sebagai trainee, melainkan sebagai DPO atau SDPO dikapal.
DNV-GL mempunyai aturan berbeda dengan NI, jalur ini bisa dipergunakan bagi yang ingin menjadi DPO tanpa masa berlayar yang rumit dan sulit terpenuhi.
Skema dari DNV-GL ini telah diakui oleh NMA (The Norwegian Maritime Authority), artinya NMD menganggap pemilik sertifikat DPO DNV-GL adalah sama/setingkat dengan NI DPO Certificate.
NMD mengembangkan kedua skema ini (NI & DNV) secara parallel dan memberlakukanya secara International.
Untuk mendapatkan DPO DNV-GL certificate, maka harus mengikuti training dan online exam test hanya di training centre yang di approved/akreditasi oleh DNV-GL. Acuan standard trainingnya adalah DNV-GL standard ST-0023 (silahkan googling dan unduh standard ini)
Berikut adalah training centre yang di approved oleh DNV-GL.

DPO DNV-GL memerlukan pengorbanan uang yang banyak, karena sejauh ini training centre yang mendapatkan approval DNV hanya ada di Norwegia dan Ukraine.
Bagi pemilik NI DP Advance Certificate bisa mengikuti DPO DNV-GL Specialization course + DNV Exam selama satu minggu dengan biaya sekitar USD 8000.
Adapun skema DP DNV-GL terbagi menjadi 4 level sebagai berikut:
1. Level 0 – DPO Preparation/Self study.
Bisa dilakukan secara online dengan OTS (Onboard Training System) yang dikembangkan oleh SMSC, disini calon DPO akan belajar tentang theory dan prinsip kerja dari DP System.
DPO Preparation ini bisa digantikan dengan mengikuti NI DP Basic yang mendapatkan approval dari Nautical Institute, Jadi bagi para pemilik NI DP Basic juga dianggap telah memasuki Level 0 DP DNV-GL.
2. Level 1 – DPO Start.
DP Simulator course selama 5 hari, calon DPO digembleng dengan Kongsberg full mission simulator guna mendapatkan experience sebagaimana keadaan sebenarnya di kapal.
3. Level 2 – DPO Sea Time.
Jika mengacu pada standard SMSC, DP Seatime dilakukan dikapal selama minimal 20 hari X 4 Jam dengan menggunakan SMSC reporting from ditambah 5 hari DP Simulator course.
Menariknya adalah bagi pemilik NI DPO Simulator/Advance, sudah jumping otomatis berada pada level 2 apabila memiliki DP Seatime yang di record dalam NI DP Logbook selama minimal 1 bulan (270 hours) active DP Seatime.
4. Level 3 – DPO DNV Specialization course.
Candidate DPO digembleng dengan practical operation Kongsberg full mission simulator training selama 4 hari sesuai dengan specialisasinya.
Misalnya:
Calon DPO berpengalaman dibidang Supply/anchor handling/diving, maka dia bisa mengambil specialisasi “AJ/S = Station keeping”. Jika calon DPO berpengalaman dibidang ROV/Survey/Cable laying/trenching, maka bisa mengambil specialisasi “AJ/FT-AT = Follow target/Auto track”.
Konten DNV Specialization course jauh berbeda dengan NI Advance course.
DNV course betul-betul kejar tayang full practical dengan berbagai macam mode/failure/cuaca/manual manuver, sehingga calon DPO akan mempunyai judgement yang handal ketika dikapal.
Tidak ada tempat untuk belajar theory di training center pada level ini, jika ingin lulus maka seluruh theory yang bersumber dari IMCA Circular harus dibaca-baca sendiri guna mempertajam pengetahuan.
Sedangkan NI Course calon DPO hanya mendapat sedikit pelajaran/practical ditempat training, selebihnya harus mengambil pengalaman di kapal, padahal biasanya dikapal kita hanya mendapatkan jenis job yang sama itu-itu saja dan jarang sekali terjadi total failure. Pun demikian pengalaman mempunyai nilai yang tidak terhingga dibandingkan simulator, jadi semua ada plus dan minusnya.
5. Level 4 – DNV-GL Examination & certification.
6. Level 4 dapat dianggap sebagai hari kelulusan, pada level ini candidate DPO akan mengikuti Practical and Theoretical test. Apabila lulus pada level ini, maka selamat anda berhak mendapat standard international DPO DNV-GL Certificate.
DNV-GL Examination 3 X lipat lebih berat dibandingkan NI Exam, pertanyaan-pertanyaan pada DNV exam banyak mengambil dari IMCA DP Circular.
Jika kamu sudah memiliki NI DP Basic dengan minimum Active DP Seatime selama 270 hours, maka bisa langsung mengikuti NI DP Simulator course (5 hari) dan DNV-GL Specialization course (4 Hari), kemudian dilanjut dengan DNV-GL Examination. Apabila LULUS maka bisa mendapatkan DPO DNV-GL Certificate.
Jika kamu sudah memiliki NI DP Simulator certificate, maka bisa langsung skip level 2 dan mengikuti DPO DNV Specialization course selama 4 hari, kemudian 1 hari untuk DNV-GL Examination. Jika LULUS maka mendapatkan DPO DNV-GL Certificate.
Seluruh element diatas harus selesai dalam waktu 4 tahun, jika ada yang terlewat dari 4 tahun maka harus retake ulang pada element yang expired saja.
DPO DNV-GL bisa menjadi shortcut untuk mendapatkan sertifikat DP Operator karena memangkas masa berlayar selama 60 hari yang digantikan dengan full mission DP Simulator training dan exam.
Saran saya bagi pemilik NI DP Basic yang sudah memiliki DP Seatime 60 hari + Company confirmation letter, bisa langsung mengikuti NI DP Advance course pada training center yang mendapat approval dari Nautical Institute sekaligus DNV. Selanjutnya disambung dengan DNV-GL Specialization course dan DNV-GL Examination selama 5 hari, dengan demikian anda bisa langsung mendapatkan full DP unlimited Certificate standard DNV-GL. Berbekal DPO DNV-GL certificate anda bisa langsung bertugas sebagai DPO/SDPO dikapal, masa layar sebagai DPO ini bisa digunakan untuk meng-apply NI DP Certificate. Cara ini lebih cepat dan hemat biaya.
Bedanya jelas kan yaa,,,,? NI DPO Certificate memerlukan masa layar yang lama (2x lipat) tapi bobot trainingnya ringan, sedangkan DPO DNV-GL masa layar hanya setengahnya NI Scheme dan digantikan dengan Kongsberg Full Mission Simulator training dengan bobot yang sangat mantap akan tapi biaya menguras kantong.
Perhatikan Schema DPO DNV-GL dibawah ini.

Setelah mempelajari prinsip kontrol dan element-elemen dari DP System, selanjutnya kita akan mempelajari fungsi-fungsi yang terdapat pada DP System.
MAIN DP MODES.
1. Joystick mode.
DP Operator dapat mengontrol posisi dan pergerakan kapal dengan "Three-axis Josytick" yaitu Surge, Sway dan Yaw.
2. Auto Heading Mode.
Pada Auto Heading, System secara akurat mempertahan kapal pada haluan yg di setting.
3. Auto Position Mode.
System secara otomatis mempertahan posisi dan haluan kapal sesuai "Set point", mode yg digunakan biasanya "New set point".
4. Mixed Joystick/Auto Mode.
Ketika dalam Joystick mode, DP Operator bisa memilih auto control pergerakan kapal (Surge, Sway, and Yaw).
Misalnya yg di auto control/lock "Sway dan Yaw" saja sedangkan surge digerakan manual Joystick.
5. Follow Target Mode.
Kapal secara otomatis mengikuti target yg bergerak dan menjaga kapal dalam "Position window" relative ke target. Target yg bergerak harus dipasang transponder/reflector sebagai position reference bagi DP System utk memonitor posisi.
6. Autopilot Mode.
Kapal dikemudikan secara otomatis sesuai haluan yg di setting.
7. Auto Track (low-speed) Mode.
Kecepatan kapal sepanjang track waypoint di kontrol secara akurat dg beberapa centimetres per detik.
Posisi waypoint, haluan dan kecepatan yg digunakan pada setiap track harus ditetapkan pada table waypoint. Auto Track DP System sedikit berbeda dengan system konvensional yang haluan selalu mengarah pada track line. Auto track DP bisa bergerak tanpa ataupun dengan merubah haluan, tergantung kehendak DPO. Jadi dari satu WPT ke WPT lain, kapal bisa bergerak tanpa merubah haluan/side ways.
8. Auto Track (move-up) Mode.
DP Operator bisa menggerakan kapal pada jarak tertentu sepanjang track. Seluruh thrusters digunakan untuk menjaga/mengontrol posisi dan haluan kapal. Kapal akan berada pada track dg posisi yg tetap sampai operator menggerakanya (new move-up).
9. Auto Track (high-speed) Mode.
Kapal bergerak mengikuti track dg kecepatan 3 - 4 knots. Haluan kapal akan terus menerus di kontrol oleh sistem untuk kembali pada track ketika kapal drift off.
Kecepatan kapal mengikuti waypoint table atau bs di adjust oleh operator.
DP Current
Definisi “Current atau arus” pada DP System berbeda dengan definisi “Arus” yang sudah kita pahami secara umum.
DP Current adalah merupakan nilai dari seluruh kekuatan arus atau gaya-gaya yang bekerja pada DP system, DP Current bisa dilihat pada DP screen monitor.
DP Current = Thruster force – Wind load, sehingga dapat diartikan bahwa DP Current adalah jumlah dari seluruh gaya-gaya dari luar (external forces) dikurangi dengan kekuatan angin (wind load).
DP Current mencakup; kekuatan arus, gelombang/ombak, gaya-gaya dari luar kapal, hydraudynamic effects, model kapal, dan termasuk gaya-gaya lain yang tidak diketahui.
DP Consequence Analysis.
DP Consequence Analysis adalah sebuah software yang akan terus-menerus menganalisa kemampuan kapal dalam mempertahan posisi dan haluan setelah terjadinya single worst case failure ketika sedang beroperasi.
DP Consequence Analysis software menu hanya tersedia pada kapal DP2 dan DP3.
Fungsi system ini akan bekerja terus-menerus setiap menit (60 detik) menganalisa “station keeping ability” kapal dan akan memberikan peringatan dini berupa alarm kepada DP operator (pre-warning alarm) ketika terjadi sebuah failure/kegagalan, yang mana failure tersebut dapat menyebabkan kapal kehilangan kendali atau tidak mampu mempertahankan posisi dan haluan pada kondisi operasional dan keadaan cuaca yang ada.
DP Consequence Analysis hanya akan aktif ketika DP System berada pada "Autoposition mode"
DP Consequence Analysis berhubungan dengan “Power dan propulsion configuration”
DP Consequence Analysis akan memberikan peringatan dini berupa alarm ketika terjadi single failure pada thrusters atau power system. Adanya peringatan ini menunjukan bahwa DP status telah degraded, loss of redundancy, dan kapal beresiko “Loss of position”.
Peringatan alarm tersebut berupa “Consequence Analysis Warning On” dengan deskripsi “Single worst case failure will cause drift-off”.
Bahkan ketika setup DP System tidak sesuai dengan konfigurasi, DP Consequence Analysis akan terus memberikan “Warning alarm" dan status DP pun degraded.
Kemudian ketika situasi sudah teratasi dan tidak lagi critical, maka pesan alarm tersebut berganti dengan “Consequence Analysis Warning Off”
Untuk mengaktifkan mode ini cukup dengan select/pilih “DP2 atau DP3”, sedangkan untuk menonaktifkan pilih “None".

Contoh:
Ketika terjadi abnormal atau failure maka system akan merespon dg warning alarm "Consequence Analysis Warning On" kemudian pada description tertulis "Single worst case failure will cause drift-off".
Maka seorang DP Operator harus sigap membaca abnormal/failure apa yang terjadi untuk mengambil langkah tepat dan tidak terburu-buru panik.
Misalnya tanpa disadari salah satu thrusters tiba-tiba fail, dan muncul consequence analysis alarm. DPO harus segera menganalisa keadaan dan mengambil tindakan cepat berupa menghentikan operasi “emergency disconnect sequence”, memberitahu semua pihak yang terlibat operasi agar bersiaga, segera keluar dari 500MZ of instalasi/platform sesuai emergency escape plan menuju ketempat yang aman. Langkah-langkah tindakan ini biasanya terdapat dalam ASOG.
DP Capability Plot.
DP Capability adalah kemampuan kapal DP dalam mempertahankan posisi dan haluan berdasarkan keadaan cuaca dan kondisi operasional.
DP Capability plot berbentuk diagram lingkaran 360 derajat (seperti ploting sheet) yang menunjukan grafik/kurva kemampuan kapal untuk mempertahankan posisinya (vessel’s station keeping ability) sampai batas maximum kondisi cuaca yang ada (arah&kecepatan angin).
DP Capability juga merupakan gambaran analisa teoritis mengenai kemampuan DP System untuk mempertahankan posisi dan haluan kapal sampai dengan batas maximum kondisi cuaca dan kondisi operasional yang ada.
Disini ada beberapa skenario, yaitu ketika semua system berjalan normal dan pada saat terjadi failure. Selanjutnya sampai kondisi cuaca yang seburuk apakah DP System mampu mempertahankan posisi dan haluan.
Terdapat cursor line EBL yang bisa digeser 360 derajat untuk melihat prediksi kemampuan DP system sesuai set up haluan.
Present system running keadaan maximum cuaca bagi kapal untuk mampu mempertahankan posisinya pada keadaan normal.
Worst single failure menunjukan keadaan maximum cuaca bagi kapal untuk mampu mempertahankan posisinya ketika terjadi sebuah failure.

Contoh:
Present system running: 60.5 knots.
Artinya adalah pada kondisi "Set point dan haluan” tersebut kapal mampu mempertahankan posisinya sampai dengan kecepatan maximal angin 60.5 knots.
Worst Single Failure: 17.5 knots.
Artinya ketika terjadi worst single failure, maka kapal masih mampu bertahan dengan kecepatan maximal angin 17.5 knots.
DP Footprint.
DP Footprint adalah sebuah ploting ilustrasi grafik (berbentuk diagram lingkaran 360 derajat) dari beberapa observasi pergerakan penyimpangan kapal terhadap posisi yang ditentukan (set point) guna mengetahui “Station keeping ability” kapal DP sesuai kondisi cuaca dan operasional di lapangan yang sebenarnya.
DP Footprint bisa di dapat dengan cara mengamati penyimpangan pergerakan kapal dari posisi yang ditentukan dalam periode waktu tertentu (misalnya setiap 30 detik), pengamatan ini dilakukan beberapa kali. Kemudian kumpulan hasil pengamatan tersebut dilukiskan dalam ploting sheet DP footprint ataupun bisa juga dengan cara screenshot dari layar minitor DP console.
Jika DP Capability plot adalah merupakan gambar analisa teoritis “DP station keeping ability”, maka DP Footprint adalah merupakan gambaran sebenarnya yang terjadi dilapangan.
DP Footprint penting dilakukan oleh seorang DP operator untuk mengetahui kemampuan “Station keeping” kapal, dengan demikian karakteristik excursion atau penyimpangan dapat diketahui dengan pasti.
DP Footprint plot juga berguna untuk menganalisa keakuratan DP Capability plot, sebab DP Footprint merupakan pergerakan actual kapal, sedangkan DP Capability merupakan kalkulasi teoritis dari station keeping ability kapal.
DP Footprint plot perlu dilakukan dengan berbagai keadaan operasional baik dalam kondisi normal ataupun failure, serta kondisi cuaca yang berbeda-beda. Dengan melakukan ini maka DPO akan mengetahui dengan pasti “Station keeping ability” kapalnya dan confident ketika mengambil keputusan.
Misalnya:
Ketika mau masuk 500mz cuaca terlihat kurang bagus, maka bisa dilakukan pengambilan DP Footprint agar DP Operator aware dengan pergerakan kapal pada cuaca tersebut.
DP Footprint juga bisa dilakukan dengan mengkombinasikan failure-failure tertentu, misalnya dengan mematikan PRS ataupun salah satu thrusters. Kemudian diamati dan digambar pergerakan kapal pada kondisi tersebut.
MOTION PREDICTION.
Fungsi Motion prediction adalah mensimulasikan pola pergerakan kapal pada saat terjadinya drift-off situation.
Hampir sama dengan DP Capability Analysis yang juga memberikan failure configuration.
Dengan fungsi ini DP Operator dapat menginvestigasi drift-off dari kapal berdasarkan keadaan operational dan cuaca yg ada.
DP Operator bisa memilih initial position kapal dan menetapkan batas-batas drift-off.
Alarm system.
System secara otomatis dan extensive mengecek data-data yang didapat dari Position Reference system, sensors, external systems dan termasuk internal sistem itu sendiri.
Ketika terjadi error atau ketidak konsistenan, maka DP Operator akan diberi tanda/sinyal berupa Audible alarm, flashing lamps dan pesan pada monitor.
FMEA (Failure Modes and Effects Analysis).
FMEA adalah sebuah analisa sistematis secara detail untuk mengidentifikasi setiap potensi-potensi mode of failure dari system atau sub-system dikapal dan bagaimana pengaruhnya terhadap DP system.
DP FMEA hanya untuk DP Class 2 & Class 3 karena berkaitan dengan Redundancy concept.
DP FMEA bertujuan untuk menyediakan dokumen investigasi secara komprehensif dan sistematis mengenai terjadinya berbagai failure condition dari sistem dikapal, sekaligus memperkirakan efek signifikan terhadap kemampuan "Station keeping".
Pada saat DP FMEA proving trials.
Seluruh system akan di test dan uji coba ability DP systems terhadap setiap terjadinya potensi kegagalan/failure, terjadinya failure-failure ini tidak boleh melampui DWCF yang ditetapkan. Sedangkan kapal harus mampu mempertahankan posisi dan haluan pada DWCF tersebut.
Requirement station keeping ketika terjadi single worst case failure adalah 30 menit. Hal ini bertujuan untuk safe terminate dari operasi yang sedang dilakukan dan sekaligus agar kapal dapat keluar dengan selamat dari installasi/platform.
Surveyor akan menentukan DWCF (Design Worst Case Failure - Scenario) yaitu skenario terburuk dari kegagalan sistem yang mungkin terjadi dan kapal harus mampu mempertahankan posisinya "Remain on station" dalam kondisi cuaca dan external forces kriteria yang bisa dilihat pada DP Capability plot.
WCF (Worst Case Failure) adalah sebuah kegagalan atau failure dalam DP system yang memiliki efek kerusakan yang parah terhadap DP Capability, WCF ini ada dalam FMEA.
Agar lebih paham, saya berikan contoh DWCF sebagai berikut:
Sebuah kapal DP memiliki 2 buah Main Engine yang digunakan sebagai mesin penggerak utama (CPP) sekaligus untuk supply power Shaft generator (SG1 & SG2), 1 buah independent Bow thrusters, 1 buah bow thrusters yang mengambil power dari Shaft generator kanan dan 1 stern thruster yang mengambil power dari 2 buah generator.
DWCF kapal tersebut adalah "Tanki harian BBM kanan terkontaminasi oleh air atau microbacteri, sehingga mengakibatkan matinya Starboard Main Engine, 1 buah bow thruster dan 1 generator"
Ketika kondisi failure ini terjadi, maka kapal harus mampu mempertahankan posisinya "remain on station" dengan sisa tenaga penggerak yang ada yaitu (M/E kiri, 1 bow thrusters dan 1 stern thrusters).
Nah, failure-failure yang diidentifikasi dalam FMEA tidak boleh lebih parah dari DWCF yang sudah ditentukan.
Setiap kapal memiliki FMEA dan DWCF yang berbeda-beda tergantung konfigurasi power management system.
CAMO, TAM, & ASOG.
CAMO (The Critical Activity Mode of Operation)
Redundancy konsep tidak akan berjalan dengan baik apabila system dan perlengkapan kapal tidak dioperasikan dengan benar.
CAMO disajikan dalam bentuk tabel untuk memberikan panduan tentang setup konfigurasi DP System, Power generation and distribution, propulsion system, reference system, peralatan dan standar operasional agar kapal mencapai maximum level redundancy, functionally dan operasional. Sehingga ketika terjadi kegagalan sistem, maka impact yang ditimbulkan tidak akan lebih parah dari Worst case design failure.
CAMO disusun berdasarkan FMEA (proving trials) dan konfigurasi setup DP System ataupun Power management system.
Pemahaman simplenya begini:
"Kapal harus dioperasikan dengan standar konfiguragi CAMO ketika ON DP"
Tabel CAMO hanya terdiri atas 2 kolom yaitu:
- Green (Normal) adalah jika semua system dan perlengkapan berfungsi dengan baik dan sesuai dengan konfigurasi DP set up requirement.
- Blue (Advisory status) adalah apabila green condition tidak terpenuhi, dalam hal ini harus dilakukan risk assessment apakah harus meneruskan operasi, merubah posisi, dan atau menghentikan operasi.
CAMO bisa digantikan dengan TAM berdasarkan pertimbangan job yang dilakukan tidak terlalu critical dan terjadinya failure tidak berdampak signifikan terhadap keselamatan personnel, assets dan lingkungan.
Dengan demikian standard TAM adalah lebih rendah daripada CAMO.
Contoh table CAMO:

TAM (Task Activity Mode)
TAM juga merupakan set up konfigurasi dari pengoperasian DP System sebagaimana CAMO.
TAM dibuat berdasarkan tingkat bahaya atau resiko pada saat pengoperasian dan set up DP.
TAM digunakan jika resiko yang ditimbulkan ketika terjadi loss of position akibat single worst case failure itu sangat rendah, tidak membahayakan personel, asset dan lingkungan.
Jadi requirement konfigurasi DP set up dalam TAM lebih rendah daripada CAMO.
ASOG (Activity Specific Operating Guidelines).
ASOG berbeda dengan CAMO dan TAM.
ASOG adalah sebuah panduan yang berisi batasan-batasan operasional, kondisi cuaca (environmental), dan equipment performance limit sesuai dengan lokasi dan aktivitas spesifik yang sedang dijalankan.
ASOG juga disajikan dalam bentuk tabel format untuk memberikan panduan tentang batasan/limit dari set out operasional, keadaan cuaca (environmental), dan maximum performance equipment untuk safe DP Operation sehubungan dengan aktifitas spesifik yang sedang di jalankan.
Dari ASOG inilah kita bisa mengetahui DP Alert status sebuah kapal (green, yellow, dan red status) dan kapan harus STOP WORK.
ASOG dapat terus dikembangkan berdasarakan factor-faktor berikut:
- Kemampuan teknis sebuah kapal berdasarkan aktifitas spesifik yang dilakukan.
- Identifikasi dari CAMO.
- Kemampuan dari “Vessel Station keeping” sehubungan dengan worst case failure.
Jangan bingung membedakan ASOG, CAMO, dan TAM.
CAMO dilakukan untuk panduan setup konfigurasi DP System, sedangkan ASOG untuk panduan batasan operasional dari DP system sesuai aktifitas spesifik yang tengah dijalankan.
Jadi step_nya setelah CAMO/TAM dilaksanakan sesuai requirements baru melangkah ke ASOG, dan ASOG juga mencakup semua requirement dalam CAMO.
ASOG dan CAMO memiliki peran penting untuk keselamatan DP Operation, DPO dan Engineer wajib paham dengan requirements tersebut. Karena disitu dijelaskan secara lengkap tentang set up konfigurasi dan limit/batas machinery systems dan juga bagaimana cara mengambil tindakan secara tepat ketika terjadi error/faults dan failure/kegagalan.
Table ASOG terdiri atas 4 kolom yaitu:
- Green (Normal operation) adalah semua system berfungsi dan beroperasi dalam batas performance limit.
- Blue (Advisory status) adalah ketika system mendekati batas performance limit dan terjadi alarm status. Operasi bisa terus dilanjutkan setelah dilakukan risk assessment dan jika failure tidak berefek pada DP redundancy.
- Yellow (Reduced status) adalah ketika system sudah pada batas performance limit, terjadi failure pada komponen atau system yang akan menyebabkan hilangnya redundancy. Dalam kondisi ini kapal masih mampu mempertahankan posisi dan haluan tapi sudah kehilangan redundancy (degraded status).
- Red (emergency status) adalah ketika operasional atau system sudah melampui batas pengoperasian performance limit dan terjadi kerusakan komponen atau system yang menyebakan kapal hilang kendali “Lost of control or position”
Dari 4 status diatas kita dapat mengetahui tindakan-tindakan apa yang harus diambil ketika terjadi failure guna melindungi nyawa personel/crew, asset dan lingkungan. (To protect the crew/personnel, asset and environmental).
Sedikit contoh ASOG.

DP Checklist.
Checklist penting dilakukan karena berfungsi sebagai alat bantu pengingat dan document of evidence bagi DP Operator apakah semua sistem/step telah dilakukan sesuai procedure. Karena manusia tempatnya salah dan lupa, maka dibuatlah checklist.
DP Checklist antara lain:
- DP Field Arrival/Re-entry Trials.
- 500MZ Pre-entry Checklist (SMS Form)
- 6-Hour watchkeeping periodic checklist.
- 6-Hour Engine Room checklist.
- Engine Room DP Checklist.
- Off DP Checklist.
- DPO Familiarisation checklist.
- Engineer Familiarisation checklist.
- DP Footprints plotting.
DP ALERT STATUS.
Setidaknya ada 3 macam “DP Alert Status Level” yang dikenal pada kapal-kapal DP.
DP Alert ini ada yang menggunakan lampu dan alarm, namun ada juga yang hanya cukup menjadi pengetahuan untuk mengambil tindakan secara tepat sesuai panduan dalam ASOG.
Berikut ini adalah 3 level DP Alert Status:
- Green atau Normal operational status. Apabila seluruh elemen dan perlengkapan DP system telah “ON LINE”sesuai dengan batas standard yang ditentukan dalam safe working limit.
- Yellow atau Degraded DP status. Pada umumnya DP System akan degraded status apabila berada pada kondisi:Salah satu system atau komponen mengalami kegagalan/failure yang menyebabkan DP Equipment akan loss of redundancy (contoh: salah satu thrusters atau gyro failure)Melebihi safe working limit (contoh; power thrusters load melebihi 50%)Kapal bergerak melebihi ambang batas posisi dan haluan yang di tetapkan (exceed excursion of heading and position limit)
- Red atau DP emergency status. Kapal dianggap mengalami “Red DP emergency status apabila mengalami “Loss of position” atau ketika loss of position sudah tidak dapat dielakan lagi (Kapal kehilangan “Station keeping ability”)
Diantara “Green dan Yellow DP status” biasanya juga ada level status tambahan yang disebut “Advisory status”. Advisory status ini dibuat untuk memberikan peringatan awal kepada DPO bahwa telah terjadi suatu keadaan tertentu yang perlu dilakukan tindakan antisipasi dan risk assessment sebelum melanjutkan operasi..
Contoh advisory status; thrusters load mendekati 45%, terjadi alarm pada salah satu equipment, dll.
Untuk itu DPO atau Engineers perlu melakukan tindakan antisipatis agar DP System tidak sampai degraded atau menjadi yellow status.
JENIS KAPAL DP BERDASARKAN CLASS.
1. DP Class 1 (DP-11/12)
DP Class 1 tidak memiliki “Redundancy System”, kapal akan loss position ketika terjadi single fault.
DP Class 1 ada 2 type yaitu “DP-11 dan DP-12”
DP-11 = Stand alone DP Control System, The controller unit terhubung dengan operator station melalui single network dan direct interface dengan thrusters, power plant, PRS, dan sensors.
DP-12 = Integrated single DP control system, the controller unit terhubung dengan operator station melalui dual high speed data network.
DP-12 System dirancang untuk terintegrasi dengan Marine Automation dan Thrusters control system, dalam konfigurasi ini thrusters dan power systems interfaces dengan bagian2 yg lain melalui dual data network secara terintegrasi.
Sehingga capability DP-12 lebih tinggi dibanding DP-11.
Namun demikian kedua system ini sama-sama diakui oleh IMO Equipment DP Class 1.
2. DP Class 2 (DP-21/DP-22).
DP Class 2 memiliki dual-redundant, sehingga kapal tidak akan “Loss of posisition” ketika terjadi single fault pada “active component atau system”.
Active component: generators, thrusters, switchboard, remote control valve, dan sebagainya).
Sedangkan static component dianggap tidak akan mengalami failure/kegagalan manakala terdapat proteksi yang memadai, tahan uji, dan mendapat persetujuan dari vessel class administration.
Static component: Kabel-kabel, pipa-pipa, manual valve, dll.
Ada 2 type DP Class 2 yaitu “DP-21 dan DP-22”
DP-21 = Stand alone dual redundant DP control system.
The controller unit (DPC-2) dan operator station terhubung melalui dual high-speed data network. DP System direct interface dengan thrusters, power plants, PRS, dan sensors.
DP-22 = Integrated dual redundant DP control system. DP-22 System dirancang untuk terintegrasi dengan Marine Automation dan Thrusters control system, dalam konfigurasi ini thrusters dan power systems interfaces dengan bagian-bagian yang lain melalui dual data network secara terintegrasi.
3. DP Class 3 (DP-31/32).
DP Class 3 memiliki triple-redundant (DPC-3) dan identik dengan 3 operator station. Sehingga kapal tidak akan “Loss of position ketika terjadi single fault pada “Active component atau system”.
Single failure yang dimaksud pada DP Class 3 adalah semua single failure criteria yang terdapat pada DP Class 2 dengan tambahan failure pada semua komponen yang terdapat dalam watertight compartement & fire-subdivision dari bahaya kebakaran dan kebocoran.
Ada 2 type DP Class 3 yaitu “DP-31 dan DP-32”
DP-31 = Stand alone triple redundant DP Control System.
DP-32 = Integrated triple-redundant DP control system.
Agar memenuhi IMO Equipment DP Class 3 requirements, maka kapal harus dilengkapi dengan redundant DP System dan sebagai tambahan harus dilengkapi dengan instalasi sebuah komponen DP lengkap (DP Control & Power System) secara terpisah yang dilindungi oleh A-60 class division sehingga seluruh komponen-komponen terproteksi dari bahaya kebakaran/kebocoran.
Dengan demikian, DP Class 3 tidak akan mengalami kegagalan system dan mampu bertahan tanpa “Loss of position” ketika terjadi kebakaran/kebocoran karena masih ada operation control station terpisah yang terlindungi oleh A60 class division pada satu kompartemen (fire sub division or watertight compartment).
Redundancy adalah kemampuan sebuah komponen atau system untuk mempertahankan/mengembalikan/me_restore fungsinya ketika terjadi sebuah kegagalan/failure, sehingga kapal tidak akan “Loss of position & heading” ketika terjadi single failure.
Redundancy system bisa berupa sistem instalasi/komponen ganda (multiple components) ataupun system alternative lain yg mampu menggantikan fungsi alat/sistem tersebut ketika terjadi kegagalan/faulty.
Kelebihan dan kekurangan kapal DP System dibandingkan dengan kapal Non DP.
Kelebihan:
- Kapal/Barge/Rig mempunyai tenaga penggerak sendiri yg memadai dan tidak memerlukan bantuan kapal lain (Tugs) untuk segala jenis operasinya.
- Lebih cepat dan mudah untuk "Set up" di lokasi.
- Kapal mempunyai kemampuan maneuvers yg cepat dan bisa berpindah2 lokasi dengan leluasa.
- Cepat merespon ketika terjadi perubahan cuaca.
- Dapat merespon dengan cepat perubahan posisi ketika diminta.
- Mempunyai kemampuan yg beraneka ragam (Auto position, auto track, follow target, etc).
- Dapat beroperasi dalam jangka waktu yang lama, dan tidak mengalami fatigue ketika manuver sebagaimana manusia.
- Bisa beroperasi dilaut yang dalam dan cuaca berat sekalipun.
- Pekerjaan Rig/Platform/Survey/Diving, dsb bisa lebih cepat selesai, sehingga lebih ekonomis.
- Dapat mengurangi kerusakan dasar laut, beda dg kapal yg menggunakan jangkar atau jack-up.
- Menghindari kerusakan platform krn kapal tidak perlu sandar diikat tali ke platform.
Kekurangan:
- Rawan terjadi power failure/shortage.
- Rawan terjadi kegagalan thrusters/propulsion system.
- Rawan terjadi electronics failure krn System kapal DP yg begitu komplek.
- Biaya charter kapal lebih mahal.
- Konsumsi minyak lebih tinggi krn mesin jalan terus.
- Ada kemungkinan terjadi "Position excursion/penyimpangan posisi" akibat drift off/drive off.
- Resiko lebih besar utk pekerjaan bawah air "diving/ROV".
- Sistem kurang bekerja dg baik di perairan dangkal.
- Memerlukan Position Reference System secara terus menerus.
- Untuk pekerjaan yg berbahaya, harus ada Redundancy System.
- Perlu DP Operator yg kompeten dan termasuk Electrician/Engineer utk perawatan DP System.
DP SET UP & WORKSITE APPROACHES.
Arrival checks
Ketika kapal sudah sampai di lokasi, maka sebelum memasuki “500M Zone of Offshore Installation” harus dilakukan “DP SET UP dan DP Field Arrival/Re-entry Trials Checklist”.
Kapal akan diberhentikan pada wilayah aman untuk approach di luar 500M Zone. Serangkaian checklist dam testing pun dilakukan, mulai dari testing Main engine, steering, thrusters, power generation, communications systems (VHF), switch on reference System, crew manning, dsb.
Untuk DP Class 2 atau 3 normalnya Bridge team harus double manned, satu orang akan duduk mengawasi DP Console function dan satunya lagi melaksanakan tugas Bridge watch function. Hal ini dilakukan secara bergantian untuk menghindari kebosanan.
Berikut ini adalah tahapan-tahapan DP SET UP "AUTOPOSITION MODE":

- Setelah seluruh machinery dan perlengkapan sudah siap sesuai dengan konfigurasi DP System, maka manoeuvring control bisa di transfer ke Aft Bridge console, kemudian change over control dari "Manual" ke "DP" pada selector switch DP Console.
- Single press/tekan tombol "Enable" untuk: Thrusters, Properllers dan Steering sampai tombol lampu utk masing-masing thrusters menyala "Ready".
- Apabila seluruh thrusters sudah di_enable pada DP Console. Double press tombol "Joystick" sampai menyala tanda "Ready". Disini lagi-lagi kita perlu testing thrusters set up and feedback dengan menggunakan Joystick, untuk memastikan seluruh thrusters bekerja dengan baik pada DP control system.
- Steady_kan kapal dengan Joystick control dan turunkan pergerakan ROT (Rate of Turn) sampai sekecil mungkin mendekati angka Nol "0", kemudian double press tombol "Auto Yaw" untuk Lock Haluan kapal. Kenapa harus “YAW” dulu yang di lock, bagi yang sudah paham maneouver tentu paham apa alasanya. Sepandai apapun seseorang atau system mengontrol olah gerak kapal jika haluan salah dan tidak steady, maka pergerakan kapal tidak akan bisa dikontrol dengan baik. Setelah “YAW” di enable, maka DP System berada pada mode "JSAH" (Joystick control with automatic Heading).Sensors: Gyro, winds, dan VRS biasanya tidak pernah di "Disable" dan selalu ter_connect dengan DP System walaupun dalam posisi standby.Sehingga auto heading bisa langsung digunakan tanpa meng_enable tombol "Gyro".
- Untuk melakukan fungsi "Auto Sway dan Auto Surge", maka pastikan tombol PRS sudah diaktifkan. Auto sway/surge tidak akan bisa bekerja tanpa adanya PRS.
- Selanjutnya turunkan pergerakan maju/mundur kapal (surge) dengan Joystick control sampai mendekati angka Nol "0" dan double press tombol "Auto Surge", maka pergerakan surge sudah di "Lock". Kapal tidak akan bergerak maju ataupun mundur.Kini kapal hanya bisa bergerak ke samping kiri dan kanan (Sway). Disini dapat kita perhatikan pergerakan kapal hanyut ke sisi mana, dalam tahap ini kita bisa mencari haluan yang tepat sebelum meng_enabled sway. Ketika pergerakan sway kapal sudah 0.1 knot atau kurang, maka itulah haluan yg tepat untuk melakukan operasi.
- Untuk me_lock pergerakan kesamping kiri/kanan (Sway), turunkan kecepatan sideway mendekati angka Nol "0" dan double press tombol "Auto Sway"Saat ini kapal berada pada full "Auto DP atau Auto Position".
Secara teoritis dan manual instruction, minimal 30 menit kapal harus full "Auto DP" untuk membangun “DP Mathematical model” dan settled in position sebelum memulai operasi/kerja.
DP adalah computer sedangkan kondisi environmental dan operasional tidak pernah konstan, maka DP System memerlukan waktu beberapa saat untuk settled position atau menyesuaikan keadaan dan sekaligus memastikan seluruh equipment bekerja dengan baik.
Kesempatan waktu 30 menit ini bisa digunakan oleh DPO untuk menyelesaikan paper work seperti: Pre-entry 500M Zone & DP Field Arrival Checklist, Toolbox meeting, Risk assessment dan juga membaca arus/angin guna setting haluan yg tepat agar meminimalisir pemakaian thrusters.
Bad seamanship practice adalah mendekati Worksite dengan manual maneuvers dan SET UP DP pada last moment ketika kapal sudah sangat dekat platform/Rig/Barge.
Resiko dari praktek semacam ini adalah:
- DP System tidak mempunyai waktu untuk membangun "Mathematical model" berdasarkan situasi dan kondisi yang ada, sehingga ketika terjadi failure pada PRS maka DP System tidak bisa menyediakan “Deck Reckoning mode”. Sedangkan fungsi dari “dead reckoning” adalah ketika terjadi failure pada position reference system (PRS), maka kapal akan tetap berada pada posisinya selama beberapa menit berdasarkan hitungan posisi terakhir yang tersedia. Jika tidak ada “dead reckoning” ketika PRS failure, maka kapal akan langsung loss of position atau kehilangan kendali.
- Tanda kesiapan "Mathematical model", kapal akan menyimpang dan bergerak dari posisi yang ditetapkan untuk beberapa saat (belum stabil) dan ini sangat berbahaya apabila posisi kapal begitu dekat dengan Offshore installation.
- Tidak ada jaminan bahwa DP System akan bekerja dengan baik, bahkan biasanya failure system banyak terjadi pada saat pertama kali "Switch on DP". Jika DP Fail, maka resiko kontak/tabrakan dengan platform begitu tinggi.
- DP System beresiko "Drive-on" kearah platform ketika pertama kali "Switch on DP". Tindakan untuk menghentikan pergerakan ini akan memaksa mesin bekerja maksimal dan beresiko terjadi "Blackout".
Mendekati Worksite area harus dilakukan dengan pelan tapi pasti. Dengan planning yang baik, termasuk didalamnya adalah "Contingency plan untuk escape route" guna menghadapi kegagalan systems.
Setelah seluruh paper works selesai dilakukan dan DPO puas dengan performance DP System, kini saatnya untuk approacing working area dengan "Auto DP".
1. Kecepatan kapal dalam 500M Zone.
- Distance 500 - 100 meter ke lokasi, setting kecepatan kurang dari 1.5 knots.
- Distance 100 meter ke lokasi, setting kecepatan kurang dari 0.5 knots.
Yang harus diperhatikan disini adalah ketika kapal hampir mendekati posisi set up, turunkan kecepatan secara gradually/bertahap sampai pada jarak 10 meter dari lokasi turunkan kecepatan kapal menjadi 0.2 knots.
Pergerakan kapal kesamping (Sway) dengan setup speed yang terlalu tinggi maka akan memaksa thrusters akan bekerja secara maksimal yang beresiko overload bisa berakibat "Blackout".
2. Increments pergerakan dalam 500M Zone.
Setting "Increments of move" pada jarak 500 - 100 meter biasanya kurang dari 50 meter.
Setting "Increments of move" pada jarak 100 meter ke lokasi, harus kurang dari 10 meter.
Ini dilakukan untuk meminimalisir kesalahan over distance akibat salah “klik tombol” yang bisa berakibat membuat kontak dengan platform.
Hal ini dilakukan jika approach menggunakan increament.
3. ROT (Rate of Turn) haluan kapal harus kurang dari 10 derajat/menit.
4. Centre of Rotation (COR), biasanya di set pada "Midships".
Apabila COR di set pada posisi "Midships", maka titik putar kapal adalah mindships/tengah-tengah kapal dan dapat meminimalisir pemakain thrusters ketika merubah haluan.
Perhatikan jarak clearance haluan/buritan kapal ketika merubah haluan dengan Midships sebagai COR.
Ada 4 pilihan untuk setting COR:
- COR at "Fore Pivot", maka haluan menjadi titik putar kapal.
- COR at "Aft Pivot", maka buritan sebagai titik putar kapal.
- COR at "Midships", maka titik tengah-tengah kapal sebagai titik putar.
- COR juga bisa diset atau atur nilainya sesuai kehendak dari DPO, misalnya 5 meter dibelakang Midships, dsb.

5. Critical and Allowable Vessel Excursions.
Critical and allowable excursions limit harus di SET.
Critical limit tidak boleh melebihi setengah dari jarak kapal ke platform/instalasi, sedangkan allowable limit tidak boleh melebihi setengah dari critical limit.
6.Position/Heading deviation "Warning and Alarm limit"
Setting position "Warning limit" tidak boleh melebihi Allowable excursion limit.
Setting position "Alarm limit" tidak boleh melebihih critical excursion limit.
Contoh:
Jarak dari kapal ke platform sekitar 10 meter, maka critical limit tidak boleh melebihi 5 meter dan Allowable limitnya sekitar 2.5 meter.
Dengan demikian setting "Warning limit" tidak boleh melebihi "2.5 meter".
Sedangkan setting "Alarm limit" tidak boleh melebihi 5 meter.
Heading deviation "Warning and Alarm limit".
Heading "Warning limit" harus di set pada nilai/angka yg sekiranya terjadi deviasi haluan, maka deviasi tersebut tidak menyebabkan pergerakan kapal melebihi "Allowable Excursion Limit".
Heading "Alarm limit" harus di set pada nilai/angka yg sekiranya terjadi deviasi haluan, maka deviasi tersebut tidak menyebabkan pergerakan kapal melebihi "Critical Excursion Limit".
7. Thrusters efisiency pada kondisi perubahan draft dan trim.
Perubahan draft/trim sudah biasa terjadi saat kapal melakukan supply operation dengan Rig/platform. Pada perairan yang dalam keadaan ini biasanya tidak banyak berpengaruh pada thrusters efisiensi, namun lain halnya jika kapal beroperasi pada perairan dangkal atau shallow water.
Perubahan draft dan trim pada perairan dangkal mempunyai pengaruh yang signifikan terhadap thrusters efisiensi, terutama pada bow tunnel thrusters. Kondisi ini dapat menyebabkan penurunan “Vessel’s station keeping ability” akibat dari thrusters yang tidak makan. Untuk itu draft/trim perlu dipertahankan dengan cara pengisian tanki-tanki ballast.
CONTINGENCY PLAN & ESCAPE ROUTE.
Keadaan darurat bisa terjadi karena; Blackout, engine & thrusters failure, PRS & Gyro failure, dan atau computer system failure.
Begitu kapal sudah stabil dan berada pada working position yang ditetapkan.
Sebelum memberikan "green light" memulai pekerjaan, DPO perlu membuat perencanaan "Emergency Contingency Plan" dan termasuk “Escape Route” untuk keluar dari lokasi dengan selamat ketika terjadi keadaan darurat. Dalam kondisi ini kapal harus mampu mempertahankan posisi sampai pekerjaan dihentikan (task aborted) dan kapal dapat keluar dengan selamat dari “500m safety zone of installation”
Bahkan mungkin mengharuskan DPO untuk maneuvers dengan Joystick atau manual kontrol untuk escape dari lokasi. Makanya penting bagi DPO untuk melatih kamampuan olah gerak kapal secara manual.
Escape route harus diidentifikasi dengan jelas, agar pada saat panic menghadapi keadaan darurat DPO sudah paham dengan tindakan yang harus diambil.
Pada kapal-kapal konvensional ketika kondisi darurat, Perwira senantiasa diarahkan untuk memanggil Nahkoda. Sedangkan pada kapal DP, seorang DPO harus mampu menghandle semua keadaan dengan confident. Memanggil Nakhoda memang keharusan, tetapi nampaknya kehadiran Nakhoda akan terlambat dan tidak bisa berbuat apa-apa dikarenakan jarak yang begitu dekat dengan platform.
Apabila keadaan angin dan arus "Blow-on" kearah worksite location (dari samping). Ketika keadaan darurat kebanyakan orang akan berpikir harus keluar dari lokasi dengan cara sideways move agar segera menjauh dari platfotm.
Cara begini tidaklah tepat karena pergerakan sideways sangat lambat dan memaksa thrusters untuk bekerja secara maksimal yang justru beresiko overload power, bahkan bisa hanyut kembali kearah platform.
Maka cara paling tepat jika keadaan memungkinkan adalah maneuvers bergerak maju atau mundur sepanjang platform sampai kapal "drift-clear" dari instalasi, pergerakan maju/mundur kapal akan lebih cepat dengan menggunakan power engine yang relatif kecil.

8. Safe Operating Limits
Ketika seluruh system bekerja dengan baik dan tidak ada failure apapun, maka dapatkah DPO menghentikan operasi kerja dan apakah panduanya?
Jawabanya adalah panduan ini terdapat pada ASOG (Activity Specific Operating Guidelines).
Jika kapal tidak memiliki ASOG sebagaimana kapal-kapal DP1, maka patokanya adalah:
- Power consumption dan output level; Jika power consumption melebihi 50%, maka pertimbangan untuk menghentikan operasi harus segera di putuskan.
- Thrusters load; Jika thrusters load sudah melebihi 50%, maka rubah haluan atau stop operasi.
- Weather condition; Walapun kapal DP mampu bertahan pada spesifik weather tertentu, namun keadaan cuaca sehubungan dengan keselamatan crew dan seberapa cepat kapal bisa escape dari lokasi harus menjadi pertimbangan penting dalam mengambil keputusan.
- Patokan yang paling penting adalah adalah kemanpuan DPO itu sendiri, jika DPO merasa kesulitan atau tidak mampu mengontrol kapal untuk escape dari lokasi secara maneuvers manual, meskipun DP System masih mampu mempertahankan posisi dan haluan dalam limit yang ditetapkan. Maka itulah saat yang tepat untuk menghentikan pekerjaan dan memutuskan "Waiting on weather".
Semoga tulisan ini bermanfaat dan dapat menambah wawasan di dunia pelayaran.
Catatan:
Siapapun diperbolehkan untuk mengcopy tulisan ini sebagai bahan belajar “Dengan tetap menyertakan sumber asalnya”.
Jika kita mengcopy tulisan, kemudian menyebarkanya dalam medsos atau hard copy tanpa menyebut sumber asal, maka itu adalah PLAGIAT TULISAN ORANG.
Inilah yang disebut dengan ADAB, Kata ulama "Dahulukanlah adab sebelum ilmu"
PLAGIAT adalah merupakan kejahatan literasi, pencurian hasil karya dan mematikan kreatifitas penulis.
Mari kita hormati dan hargai kreatifitas orang lain dengan tidak melakukan PLAGIAT atau pencurian/pengakuan hasil karya.
Tentunya tombol “Share” di medsos akan lebih baik dibandingkan copy paste.
Tidak ada komentar:
Posting Komentar