ARAMCO SDPO/DPO Evaluation.

Alhamdulillah, kali saya ingin berbagi dengan seluruh pelaut-pelaut Indonesia mengenai "Questions and Answers" yang besar kemungkinan akan ditanyakan oleh Aramco Quality assurance guna mendapatkan Aramco approval letter.
Semoga article tulisan ini bisa bermanfaat, menambah pengetahuan kita, dan tentunya harapan saya akan semakin banyak DPO tanah air yang bisa bergabung di kapal-kapal Saudi Aramco.
Untuk Aramco Offshore Manual banyak yang saya remove dari tulisan ini dikarenakan menyebarkan dokumen tersebut adalah merupakan tindakan illegal, jadi silahkan dibaca-baca sendiri ketika dalam masa familirisasi.
Jangan kikir dalam berfikir.
Salam dari laut,
Zie Ahmadi.
The evaluation of Deck Officers for competency or knowledgeable in the following areas (Ini adalah materi-materi pokok yang akan ditanyakan):
- Rules of the Road (COLREG 1972).
- Oil/Gas Field Procedures: Procedures of entry to and operation inside any oil/gas field including the 500m Safety Zone and H2S Gas procedures when alongside platforms, Emergency Response Procedures in case of emergencies/disasters including the requirement for incident reporting.
- Marine Department Procedures: All procedures appertaining to his Vessels operations. Knowledge of Emergency Response Plans appertaining to his Vessels operations and knowledge of the requirements for incident reporting.
- Boat Handling: Practice and Theory.
- Use of Radar
- Tide Tables: The ability to calculate Under Keel Clearance (UKC) and in particular the minimum UKC for crossing subsea installations and transiting / working in shallow water areas.
- Compass Work: Variation and Deviation, methods of error checking and adjustments
- Current Set and drift calculations
- Knowledge of own Vessel: Navigation equipment, firefighting, towing and anchor handing equipment, bulk and liquid transfer systems, anchoring and mooring equipment, safety standby and rescue operations equipment, cargo loading and offloading equipment, Protective Planned Maintenance, power management and companies safety management system.
- Navigational Chart Work: Chart symbols, especially chart symbols used on Saudi Aramco Field Charts (oilfield symbols); create a safe Passage Plan from one location to another location within a field; and correctly apply chart corrections.
In addition evaluation of DPO
For the DP OSV Vessel, all DP Officers will undergo a full Evaluation asf:
- Complete all the requirements for all non DP Officer above.
- Demonstration of full knowledge of all DP bridge equipment.
- Demonstrate competency in handling the Vessel with ‘Manual’ Controls (No Joystick). This will include, but not limited to, steering while under way, berthing and un-berthing the Vessel
- Demonstrate competency in handling the Vessel using all DP Modes fitted to the Vessel
- Demonstration of competency in de-activating DP Console
- Present up-to-date DP Certificate
- Present an up-to-date DP Logbook
Practical maneuvers evaluation (SDPO should able to maneuvers the vessel manually) - Practical maneuver only for SDPO
Actions to be taken prior practical maneuver are as follows:
- Conduct tool box meeting with all crew member.
- Check the vessel draft prior maneuvering
- Check forward and aft distance with other vessel
- Check the tide table to determine current speed and direction
- Check anemometer to determine wind speed and direction.
- Prepare departure check list and Go No-Go check list, Follow the procedure as per check list.
- Report to Tanajib port control on VHF Ch.69 “We have ARAMCO QA on board and request permission to start M/E for practical manoeuvre evaluation purpose”
- When the M/E, B/T, Steering gear and windlass are ready. Report to Tanajib port control on VHF Ch.69: “M/E ready and request permission to pull out for practical manoeuvre evaluation purpose”.
- Once all ropes on board, again report to Tanajib port control on VHF Ch.69 “All ropes are on board and request permission to pull out for practical manoeuvre evaluation purpose”.
- You can start pull out from the berth and follow instruction given by ARAMCO QA. Maintain good communication with all crew and perform good practice on bridge team management.
DP "SET UP". Once the vessel clear from the berth, ARAMCO QA will ask you to perform change over control from "Manual to DP Mode" and start "Setting-up DP".
- Adjust the heading with appropriate wind/current direction.
- If the thrusters and steering control still on the forward, change all thrusters control to the aft/stern control.
- Turn selector switch to DP Mode, enable all thrusters, rudder, PRS (normally only DGPS during evaluation).
- Take on Joystick control, check for thrusters setup and feedback, reduce the vessel movements as close to zero as possible, step by step press "Auto yaw - Auto sway - Auto Surge" and now you are in "Auto DP mode".
- Perform DP checklist (Gyro, VRS, Wind sensors, PRS, speed, ROT, COR, Alarm, UPS, together with power plant and thrusters system).
Can you start operation once you completed Setting-up the DP Mode?
No, I can't start the operation and the vessel should be in full DP for a minimum "30 minutes" to ensure that the DP System has time to settle the vessel into the location and build Mathematical model to its optimum stage.
How many distance to the structure/installation for safe operation?
As far as practicable from the installation, but if nature of operation required to come closer, the closest approach shall not be less than 10 Meters. Where in any instance these criteria cannot be met full determination shall be taken in the Risk assessment process and incorporate into safe working limits developed for the particular location.
What are DP sensors and Reference system on your vessel?
You will find the exact answer if this question on "DP Operation manual".
The example of DP Sensors (Environmental sensors) and Position References for DP2 are as follows:
- DP Sensors (Environmental sensors); 3 Gyro compasses to control & monitor the heading, 3 Wind sensors to monitor wind speed/direction, 3 MRU to monitor pitch, roll and heave.
- Position Reference Systems: Two DGPS dual frequency, One RADius with dual interrogator, One Spot Track with reflector, Cyscan.
What is the meaning of DP Capability Plot?
DP Capability defines as DP vessel's station-keeping keeping ability under given environmental and operational conditions. DP Capability analysis system predicts the maximum weather conditions in which the vessel is able to continue DP Operations.
DP Capability Plot. The diagram's circle showing wind speed and direction.
Present System running showing maximum weather conditions the vessel able to maintain position in normal condition.
Worst single failure showing maximum weather conditions the vessel able to maintain position in case of any single failure.
DP Consequence Analysis.
This is a software function that continuously performs an analysis of the vessel's ability to maintain position and heading after a predefined, worst case failure during operation.
The analysis function run every minute and provide the Operator with a pre-warning alarm of any situation where a failure would result in loss of ability to maintain position in the existing environmental condition.
Typical response would be a warning message "Consequence Analysis Warning On" with description "Single worst case failure will cause drift-off".
If situation is no longer critical, the message is replaced by "Consequence Analysis Warning Off".
This function is only available for DP2/DP3 class vessel.
See the below picture to activate the function.

Familiarize with FMEA and DWCF scenario (Design Worst Case Failure) on your vessel.
FMEA (Failure Mode and Effect Analysis) = Means a systematic analysis that identifies all potentional failure modes and their consequences into DP System.
This is to ensure if any failure system does occur, the vessel will remain on station&heading within specific weather and external forces criteria as detailed in the vessel capability plot.
FMEA will analyze all potential failure modes and define the vessel's design Worst Case Failure (DWCF), this DWCF will be tested in the practical FMEA proving trials. Normally allow 30 minutes for continue DP operation after a failure. But depend on operation and situation.
Familiarize yourself with DWCF on your vessel, how to prevent and action to be taken in case this failure happen.
WCF (Worst Case Failure) = The identified single failure mode in the DP system resulting in maximum effect on DP capability as determined through FMEA study.
Familiarize with your vessel DP system such as:
- Type, class of redundancy.
- Environmental sensors & Heading Reference (Gyro, MRU, Wind sensors).
- Position Reference system (DGPS, CyScan, RADARSCAN, etc).
- UPS and RCU (Remote Control Unit) and location of all components.
- How to reset and or change over the controller.
DP check list - Familiarize how to complete DP Checklist, DP Checklists are as follows:
- DP Field Arrival/Re-entry Trials.
- 500MZ Pre-entry Checklist.
- 6-Hour watchkeeping periodic checklist.
- 6-Hour Engine Room checklist.
- Engine Room DP Checklist.
- Off DP Checklist.
- DPO Familiarization checklist.
- Engineer Familiarization checklist.
- DP Footprints plotting.
Six Degrees of Freedom

- Surge = Fore and aft vessel's movements.
- Sway = Port and starboard vessel's movements (athwart ships direction)
- Yaw = Change of vessel's heading (Rotation about a vertical axis)
- Pitch = Rotation about the artwart ship axis.
- Roll = Rotation about fore and aft axis.
- Heave = Up and down vessel's movements.
Remarks:
- Surge, Sway, and Yaw are measured, monitored and controlled by DP System. To activate or control Surge and Sway requires position reference system, but to control Yaw/heading requires only heading reference system (Gyro compass).
- Pitch and Roll can't be controlled, but they must be measured & monitored with precision for accurate of position reference. Heave is not part of DP System control, but maybe required during crane & divers operation.
Location, numbers and breaker switch of the below equipment:
- Heading reference (Gyro compass)
- Vertical Reference System (VRS/VRU) - MRU
- Wind sensors.
- Position Reference System (Location, how many, type, name and principles of operation)
- Failure modes of reference system (refer to FMEA & ASOG)
- DP Operation manual.
- FMEA Proving trial document.
- Document of ASOG, CAMO, and DP Capability plot.
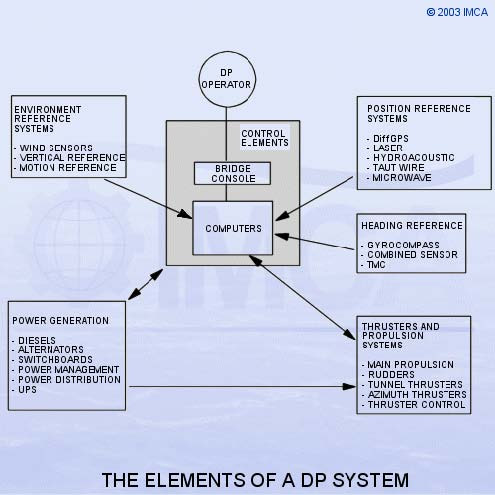
Elements of DP Systems.


DP System means the complete installation necessary for dynamically positioning a vessel comprising the following subsystems: Power System, Thrusters System and DP control system.
Elements of DP Systems are as follows:
- Power generation and control system (Including UPS & Batteries).
- Thrusters & propulsion system.
- Position reference system.
- Heading reference.
- Environmental reference.
- DP Computer.
- DP Console.
- DP Operator.
TAM, CAMO, and ASOG.
- The Critical Activity Mode of Operation (CAMO) presented in tabular form to shows how to configure the vessel’s DP system, including power generation & distribution, propulsion and position reference system for the vessel to meets its maximum level of redundancy, functionally, and operation. As such, no single point failure will exceed the DWCF.
- Task Appropriate Mode (TAM) is the configuration that the vessel’s DP system may be set up and operated in, accepting that a single failure could result in exceeding the worst case failure and could result in blackout or loss of position.
- Activity-Specific Operating Guidelines (ASOG) means guidelines on the operational, environmental, and equipment performance limits for the location and specific activity. (For drilling operations, the ASOG may be known as the Well-Specific Operating Guidelines (WSOG). Activity Specific Operating Guidelines (ASOG) are presented in tabulated format and set out the operational, environmental and equipment performance limits necessary for safe DP operations while carrying out a specific activity.
The ASOG and CAMO has an important role for the Engineers and DPO, as they make very clear the correct configuration and limits of the machinery systems for DP operations and also provide the proper response to faults and failures.
Please review your CAMO, TAM, and ASOG as per DP Operation Manual.
What will you do if you work on yellow status?
The yellow status indicates degraded status and there is a high risk of the vessel losing position if any another failure does occur. The vessel is still maintaining position but some DP critical equipment will have lost it's redundancy.
- When in yellow DP status, any vessel operations to be stopped and initiate for contingency procedures such as prepare to disconnect hose or crane.
- Notify or inform the Master, C/E, Aramco Rig Foreman, Crane operator or platform control.
- Safely pull out from the Rig/Installation to safe position outside 500 MZ.
- The vessel will not permitted to return to work until DP redundancy has regained, failures have rectified & back to green DP status, and approved by all parties involved.
The outcome of risk assessment for yellow status as follows:
- Stop supply operation; or
- Continue in manual control as agreed; or
- Relocation to the lee side.
In case of emergency or Red DP status what will you do and how do you exit from worksite?
Red DP status indicates a severely degraded status or emergency situation.
In case of emergency the safety of life if the first priority and the safety of property and protection of the environment have a lower priority.
- In this case all operations to be ceased, take immediate action "emergency disconnect sequence" and leave 500mz immediately.
- All parties are to be informed.
- The vessel may exit from worksite to safe location by manual or joystick and follow emergency escape plan by moving ahead or astern rather than moving sideways (which is the fastest way to escape).
- Emergency escape to be extended until outside 500MZ.
- No DP operation to be recommenced until a full investigation has been implemented, failure resolved and fully tested.
What will you do if loss of 1 (one) thruster while you are on DP position during supply operation with the Rig, According to ASOG guidance?
According to ASOG, in case loss of any thruster the vessel will be in “Yellow status” or degraded status and there is a high risk of losing position if any another failure occur. The vessel has lost its redundancy even still able to maintain position.
- The vessel operations to be stopped/ceased and initiate for contingency procedures such as prepare to disconnect hose or crane.
- Notify or inform the Master, C/E, Aramco Rig Foreman, Crane operator or platform control.
- Safely pull out from the Rig/Installation to safe position outside 500 MZ.
- The vessel will not permitted to return to work until DP redundancy has regained, failures have rectified & back to green DP status and approved by all parties involved.
- Or short answer asf: “CEASE/STOP OPERATIONS, BRING VESSEL TO SAFE POSITION, EXIT 500MZ. (DEFAULT EXIT WORKSITE TO 200m ON DP; 200m TO 500m MAY EXIT ON JOYSTICK OR MANUAL)
- The Master may depart in manual or joystick in case of emergency or loss position.
Your vessel is DP2/DP3 Class. During supply operation, single failure has occurred on the DP System and caused the vessel will has degraded status, but the vessel still able to maintain position and loss of redundancy only. Can you continue operation in such case?
No, I can’t continue the operation.
I have to stop/cease the operation and initiate for contingency procedure such as prepare disconnect hose or crane. Safely pull out from the installation to the safe place OUTSIDE 500mz until failure has rectified and DP redundancy regained.
The purpose of redundancy is not for continue the operation, but it is for safely terminate the operation.
Redundancy means the ability of components or systems to maintain or restore its function when a single failure has occurred. Redundancy can be achieved for instance by the installation of multiple components, systems or alternative means of performing a function.
What is the meaning of “Drift-off and Drive-off”?
- The loss of position event can be a Drift-Off or a Drive-Off.
- DP Drift-off is a scenario of the vessel drifting away from the target position by the environmental condition due to insufficient of thrusters force.
- The Drift-off can be caused by: Power system failure, thrusters system failure, DP control system failure (DP Control, Reference system, and or environmental sensors), and DPO human error.
- DP Drive-off is scenario of the vessel being pushed away (driven away) from the target position by excessive thrusters force.
- Drive-off can be caused by: thrusters failure (frozen pitch/RPM and/or Azimuth), reference system failure, common failure on two or more reference systems, DP control system failure, DPO error, and suddenly change in weather/wind/current.
What is the meaning of DP Current?
DP Current is the current value that the DP system shows on the DP screen. It is equal to “DP Current = Thrusters force – Wind load”. Thus, DP current is the total of external forces minus the wind load.
It includes: Current load, wave load, external forces, all non-model phenomena (hydrodynamic effects, etc).
What is the dead reckoning?
If all position reference system are lost, the vessel still maintaining position with estimator mathematical model.
What are the DP Incident.
The following are categories of DP Incidents which shall be reported in conjunction with DP
Operational Manual and IMCA Guidelines (IMCA 182, IMCA M103)
- DP Incident; Loss of automatic DP control, loss of position or any other incident which has resulted in or should have resulted in a ‘Red Alert’ status
- DP Near-Miss: Occurrence which has had a detrimental effect on DP performance, reliability or redundancy but has not escalated into ‘DP incident’, ‘Undesired Event’ or ‘Downtime’
- DP Downtime; Position keeping problem or loss of redundancy which would not warrant either a ‘Red’ or ‘Yellow’ alert, but where loss of confidence in the DP has resulted in a stand-down from operational status for investigation, rectification, trials, etc.
- DP Undesired Event: Loss of position keeping stability or other event which is unexpected / uncontrolled and has resulted in or should have resulted in a ‘Yellow Alert’ status.
Accurate and detailed reporting could be of vital importance in the event of a DP incident and also provide a record of the system operation.
General knowledge questions.
What are key differences between X – band and S – band RADAR?
a. X – Band RADAR
- Wave length 3 cm and frequency 9 GHz
- Because of the smaller wavelengths (3 cm) produced by X-Band radar, they use ”Small antennas”
- Shorter wavelengths are greater attenuation, so they are used for “Short range distance observation”
- X-Band radars are more sensitive, higher resolution and able to detect smaller particles/objects.
- X-Band radars are not good for “Heavy weather and long distance observation”.
- X-Band radar can detect RADAR Transponder and SART (9 GHz)
b. S – Band RADAR
- Wavelengths 10 cm and frequency 3 GHz (Opposite with X-band radar)
- Because of bigger wavelengths (10 cm) produced by S-Band radar, they use “Big antennas”
- Bigger wavelengths are less attenuation, so they are used for “Long/Near/Far range distance observation”
- The S-band radars penetration capability allow them to see trough heavy weather “Good for heavy weather observation”
- To be fitted as second RADAR, which is required on Ships GT 3000 or more as per SOLAS Regulation
Which RADAR mode (true motion or relative motion) is better for collision avoidance and please explain your reasons?
- When determining close quarter situation or risk of collision exist (Avoidance), it’s better to use relative motion rather than true motion. Because on the true motion, own ship and other targets moves at their true speed and course, hence it can distinguish or make confusing between moving and stationary target.
- The relative motion helps to find targets on a collision course. The vessel’s position appears to be stationary at the centre of the radar screen, while the targets move past it. ” The logic is obvious. If a contact appears to be moving straight toward the centre of the screen, the there is a risk of collision.
- A relative motion display shows the direction and distance at which a target will pass closest to the centre of the screen (Own ship); it’s called the CPA, or Closest Point of Approach.
- If the target appears will cross the heading marker, the target will pass ahead of us and we will pass astern of it. But if the target is going to pass behind own ship, that means we will pass in front of it.
- Set the vector and trail on “True motion”. Vector length about 30 minutes, trail length about 10 minutes, then your vessel orientation movements and past positions of each moving target are displayed on the radar screen. This makes easy to determine which targets are moving and or fixed/stationary.
Could you please explain about RADAR “Head up and North up Mode”?
- North-up mode: The North-up mode shows the targets in their true (Compass) direction from own ships. The North being maintained up on the centre of radar screen same as on the chart. The North-up mode is better to be used while navigating at open sea. Because it show me the real location of each target and land same as the chart my course drawn on it and I will not get confuse when taking bearing of each target, furthermore it is useful to determine our own heading or target without checking the compass or chart.
- Head-up mode: The Head-up mode shows the heading line being maintained up on the centre of radar screen same as our real forward view. This is useful for navigating while approaching the Port, because all targets and lands in front of the vessel are at the top of the screen. Things on the starboard side are on the right, and so forth.
Are you familiar with “Parallel index technique”?
We have to practice and familiar with “Parallel index”, how to adjust line orientation and distance between the lines.
- Parallel index is a technique a measure to monitor the progress of the vessel on track and to minimize the cross track distance (keep the vessel on track) as limited availability of sea room at coastal water and keep the vessel at safe distance from the shore line or other navigational hazard
- To adjust Parallel index, Orientation of the line can be set using EBL Marker and distance between the lines adjusted by the VRM Marker.
- Parallel index effectively used during coastal passage (Coastal congested water, TSS, narrow channel, canals and rivers). Both vessel track monitoring and traffic monitoring can be done from the same radar monitor.
- Parallel index ensure the ship’s position remain at fixed distance from any shore line, to alert mariner that he has come close to a navigational hazard and it’s valuable tool to judge the drift in confined water.

Could you please let me know, how to take bearing and distance using RADAR?
We have to practice and familiar with it, practice yourself to take bearing and distance from the target using “EBL Marker” and “VRM Marker”
RADAR plotting (OA, WA, WO, CPA and TCPA) and what is your action in case of close quarter situation is developed.
- Use EBL marker to identify priority targets. “The target that cling to the EBL line (Relative angle remain constant) indicate high risk of collision”
- WO = Way of own ship line representing of our own course and speed.
- WA = Way of another ship line representing target’s course and speed
- OA = Apparent of another ship, direction of target’s relative motion
- CPA = The predicted “Closest point of approach”.
- TCPA = The predicted “Time of the closest point of approach”.
- Altering course and increase CPA at passing minimum safe distance.
- Avoid altering course to port for a vessel forward of the beam, other than for a vessel being overtaken and Avoid altering course towards a vessel abeam or abaft the beam
What action to be taken in case radar suddenly shutdown and close quarter situation occurred?
- The first action I will stop engine or reduce speed for save manoeuvring speed. (If in doubt, stop and keep the vessel in position)
- Inform the Master.
- Take bearing and distance from the target using manual bearing. “The risk of collision shall be deemed to exist if the compass bearing of an approaching vessel does not appreciably change.”
- Take action to avoid collision with altering course until safe distance (CPA) from the target.
- Avoid altering course to port for a vessel forward of the beam, other than for a vessel being overtaken.
- Avoid altering course towards a vessel abeam or abaft the beam.
- Do not hesitate to stop engine or reduce speed to thinking about best action to be taken on such situation.
What action to be taken if you detected fishing boat on close quarter situation at your port side?
As per COLREG Rule no.18: Responsibilities between vessels, I will take action in ample time to avoid any collision by altering course to starboard keep away from the fishing boat and passed at safe distance.
What is minimum CPA for the passing save navigation?
- Please refer to Master standing order or night order for the answer of this question and make sure it is written on that book as well.
- Normally minimum CPA at open water is 1.0 NM and confined water 0.50 NM.
- Call the master if you are not able to keep safe distance as mentioned on Master standing order and night order.
What is your action in foggy time with visibility less than 0.5 NM?
- Reduce speed for safe manoeuvring speed (Rule: 6/19).
- Inform the Master.
- Post and keep proper look out by sight and hearing (Rule 5).
- Inform duty engineer for standby and keep M/E ready for immediate manoeuvre.
- Start give sound signal (Rule 35) and switch on navigation light (Rule 20)
- Properly use of Radar/ARPA equipment to obtain early warning risk of collision (Switch on both Radar, one in a long range 6 – 12 NM and one in a short range 1 – 3 NM)
- Frequently check position of the vessel and plotting course, any dangerous object for navigation to be clearly marked and avoided
- Switch on echo-sounder to keep seabed line under control.
- Use manual steering
What action to be taken when vessel negotiating area of shallow water?
- Shallow water as per MIM No.1198.001/1198.002 (Water depth less than 10 M LAT).
- Switch on echo-sounder to keep seabed line under control.
- Reduce speed for “Safe Speed” to avoid any squat effect.
- Check vessel UKC using tide table and comply with minimum UKC requirement as per MIM.
- Inform duty engineer for standby and keep M/E for emergency manoeuvre..
- Frequently check position on the chart and plotting course.
- Maintain good look out, use manual steering and check tide/weather condition.
- Density of navigation traffic, dangerous area for navigation and reporting procedure of VTS-communication
What is precaution to be taken while preparing passage plan?
- The vessel draft. To comply with minimum UKC requirements as per Offshore manual.
- The effect of tides and currents
- The availability of electronic aid to navigation and their accuracy or limitation
- To comply with Saudi ARAMCO maximum speed requirements
- To comply with Saudi ARAMCO minimum time interval for position fixing and recording (Open water take position every 30 minutes, inside field every 15 minutes).
- Keep safe distance (outside 500M Zone from any offshore installation).
- The day or night time passing of hazardous area.
- Requirement by ARAMCO VTS and Port control (Send passage plan by email for approval, do not enter the field or move until the passage plan has approved by VTS).
- Weather condition
What is your action in case of any fire inside of the accommodation board?
- Sound the alarm (Continuous ringing).
- Stop and close all ventilation/hatches/damper.
- Isolate the power.
- Proceed to extinguish the fire as per Muster list and follow instruction given by Saudi ARAMCO “Emergency response plan”
What is your action in case of any Man overboard board?
- Throw the Lifebuoy to the person overboard and in the night time one of the Lifebuoy should be fitted with light.
- Sound the alarm (3 long blast) or shout “Man overboard”.
- Post look out.
- Press GPS MOB to Position fixed/marked, Stop the engine, Medical team ready and FRC ready for action.
- Proceed to rescue the victim as per guidelines on “How to recovery persons overboard booklet” and Saudi ARAMCO “Emergency response plan”.
What is procedure prior discharging cargo bulk “cement” and In case of the Rig are not receiving cement, can you open the hose connection to ensure there is no any blockage on the line?
a.Procedure prior discharging cargo bulk cement;
- Conduct Toolbox meeting and Risk assessment with all crew member.
- Follow procedure as per cargo bulk transfer check list.
- Once hose properly connected and secured. Ensure all valve on the Vessel and Rig are fully opened.
- Blowing the lines to make sure all lines are free.
- Pressurized the tank and once the Rig confirm ready to received, we can start discharging cement bulk.
- Maintain proper communication between the vessel’s crew and Rig via VHF Radio
b.In case of the Rig are not receiving cement, we could not open the hose connection directly
- Release pressure inside cement tank via cement ventilation.
- Properly secured the hose connection using “Whip check cable”. In many case the air pressure has trapped inside the hose.
- Open the hose slowly, keep safe distance and direction from hose connection to avoid house bounced to the crew body.
Please tell me about “Toolbox meeting and Risk assessment”
- A Toolbox meeting is an informal safety meeting that focuses on safety topics related to the specific job. Such as; workplace hazards, safe working practice and procedures. Toolbox normally short duration and generally conducted at the job site prior commencement of a job or work shift.
- Toolbox meeting is the most important, because it’s covered Risk assessment and job procedure.
- Risk assessment is the combined effort to identify and analyze “What might cause harm to people and decide reasonable steps to prevent that harm”. It is contain: Nature of activity, hazard to the crew/asset/environment and how to mitigate the hazard.
Practical wear of SCBA (Self contained breathing apparatus)
We should able to practice to wear SCBA in a flash (Within one minutes).!!!”Very important..!!!”
- Press “Demand valve” on the mask to avoid air release when opening the valve. Some SCBA have “Demand valve” that would activate automatically once you start breathing. You have to familiar with your own SCBA prior evaluation.
- Open the cylinder valve to release air pressure and whistle alarm will be sounded automatically.
- Check the pressure in the bottle; make sure it’s not empty.
- Wear the face mask and pull the straps to tighten, breathe normally.
- Hold the back plate with both hands and lifts the SCBA over your head, Pull the straps to tighten.
Vessl Speed and UKC Limit requirement:
- The maximum speed limit inside Tanajib inner channel is ten (10) knots, maximum speed limit inside the harbor is seven (7) knots. The seabus are permitted to increase to a maximum twenty (20) knots in inner channel when its operating in “one way” mode.
- Maximum speed entering 500MZ of Rig/installation is 3.0 knots
- Maximum speed within 100MZ of Rig/Installation is 05 knots
- Minimum UKC cross over pipelines/subsea installation is to be 5.0 meters or more.
- Minimum UKC at normal sea bed is to be 1.0 meter or more.
- Minimum UKC whilst alongside piers/jetty facility is permitted to be decreased up to 0.3 meters or more.



Entry of enclosed space gas concentration requirement:


Practical use of AED.


Demikianlah.
Semoga membawa manfaat dan menambah pengetahuan kepada saya pribadi maupun yang membaca tulisan ini.
Segala kritik dan koreksi atas kesalahan dalam penulisan, sangat saya hargai.
Silahkan tinggalkan di kolom komentar.

Salam,
Jakarta, 01 June 2021.
Zie Ahmadi.